
Elektronický systém pro kontrolu správné polohy hlavy po některých vitreoretinálních operacích
Elektronický systém pro kontrolu správné polohy hlavy po některých vitreoretinálních operacích
Team of authors consisting of vitreoretinal surgeons and biomedical engineers developed and tested an electronic system helping the patients after some vitreoretinal surgeries to keep the recommended head position. The authors describe the principle of this system and its use in clinical practice.
Key words:
vitreoretinal surgery, head positioning, electronic system
Autoři:
I. Vícha 1; R. Girgle 1; E. Vlková 1; J. Rozman 2; P. Čech 2; M. Čížek 2; J. Dlouhý 2
Působiště autorů:
Oční klinika LF MU a FN, Brno, přednostka prof. MUDr. Eva Vlková, CSc.
1; Ústav biomedicínského inženýrství FEKT VUT, Brno, vedoucí prof. ing. Ivo Provazník, Ph. D.
2
Vyšlo v časopise:
Čes. a slov. Oftal., 67, 2011, No. 1, p. 18-20
Kategorie:
Původní práce
Souhrn
Tým autorů složený z vitreoretinálních chirurgů a biomedicínských inženýrů vyvinul a otestoval elektronický systém, který pomáhá pacientům po některých vitreoretinálních operacích udržet lékařem doporučenou pooperační polohu hlavy. Autoři popisují princip tohoto systému a způsob jeho využití v klinické praxi.
Klíčová slova:
vitreoretinální chirurgie, polohování hlavy, elektronický systém
Cíl
Cílem autorů bylo vyvinout elektronický systém, který by pomáhal pacientům po některých vitreoretinálních operacích udržovat správnou pooperační polohu hlavy doporučenou očním chirurgem.
Materiál a metodika
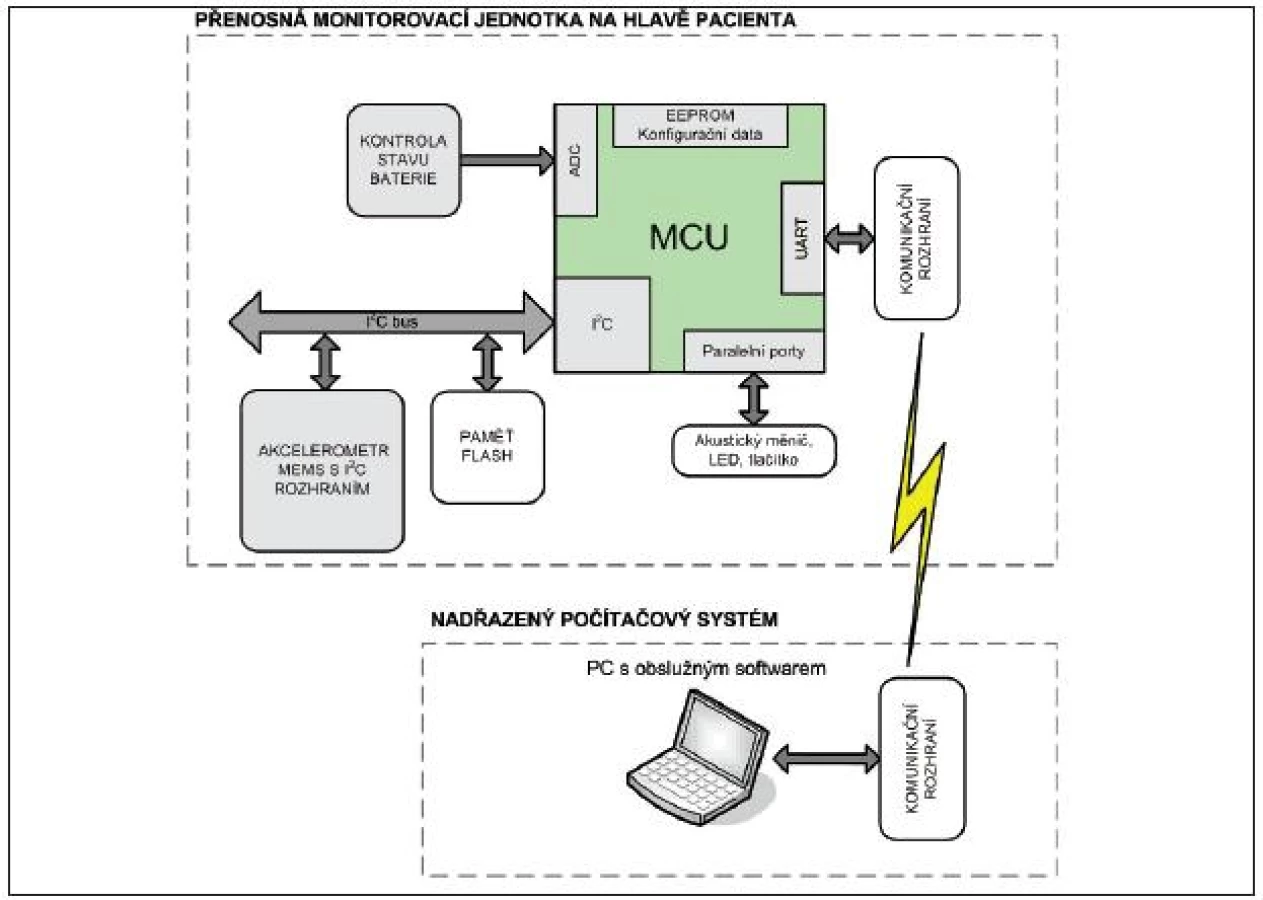
Navržený systém je tvořen třemi částmi – přenosnou monitorovací jednotkou upevněnou pružným páskem na hlavě pacienta, bezdrátovým USB komunikátorem a počítačem s příslušným programem. Přenosná monitorovací jednotka monitoruje polohu hlavy pacienta a v případě chybného držení hlavy ho upozorní akustickým signálem. Současně v pravidelných intervalech ukládá do paměti údaje o poloze hlavy a čase. Nadřazený počítač s příslušným programem umožňuje prostřednictvím připojeného bezdrátového USB komunikátoru technické nastavení monitorovací jednotky a načítání a vyhodnocení naměřených dat.
Blokové schéma řešení systému pro monitorování polohy hlavy pacienta je uvedeno na obr. 1. Základem monitorovací jednotky je mikrokontroler, který prostřednictvím sériové sběrnice komunikuje s digitálním akcelerometrem typu MEMS, externí pamětí a obvodem pro generování reálného času. Akcelerometr MEMS s digitálním výstupem představuje nejvýhodnější variantu z hlediska odolnosti proti rušení a snadné opakovatelnosti výroby zařízení. Napájení monitorovací jednotky je zajištěno baterií. Monitorovací jednotka je dále vybavena akustickým měničem pro signalizaci nesprávné polohy hlavy. Přenos dat do obslužného počítače je zajištěn bezdrátovým komunikačním rozhraním. K tomuto účelu je k počítači přes sběrnici USB připojena komunikační jednotka.
Princip monitorování polohy spočívá ve snímání náklonu hlavy ve všech směrech. Pro účely monitorování je nejvýhodnější měření náklonu založené na snímání směru vektoru tíhového zrychlení. Akcelerometry vyráběné technologií MEMS jsou schopné snímat stejnosměrné i střídavé složky zrychlení. Použitím tohoto akcelerometru v tříosém provedení upevněného k hlavě pacienta, můžeme určit směr tíhového zrychlení a tím i polohu hlavy. Aktuální poloha hlavy je pak reprezentována změřenými souřadnicemi vektoru zrychlení. Tento vektor je porovnáván s vektorem změřeným v referenční poloze (definované na začátku monitoringu lékařem) a výsledek je prezentován ve formě úhlové odchylky těchto dvou vektorů.
Výsledky
Během tříletého vývoje, úprav a testování elektronického systému dospěli autoři k takové variantě, kterou považují za optimální pro běžné klinické využití ve vitreoretinální chirurgii. Vyvinutý systém lze používat třemi následujícími způsoby:
1. Jednoduchý monitoring – uživatelsky nejjednodušší způsob monitorace polohy hlavy. Je k němu potřeba pouze přenosná monitorovací jednotka (USB komunikátor ani počítač nejsou třeba). Po provedené vitreoretinální operaci nasadí lékař pacientovi na hlavu přenosnou monitorovací jednotku (obr. 2). Poté nastaví hlavu pacienta do správné polohy optimální pro hojení sítnice (tj. do polohy, při které např. bublina expanzivního plynu ve sklivcovém prostoru tlačí na postižené místo v sítnici). Následně lékař stiskne tlačítko 1 na přenosné monitorovací jednotce (obr. 3). Tímto si přístroj zapamatuje správnou polohu hlavy a monitorace je zahájena. Jakmile se pacient od správné polohy hlavy odchýlí jakýmkoliv směrem o předem nastavitelnou odchylku (standardně je v monitorovací jednotce nastavena odchylka 30°), začne monitorovací jednotka vydávat zvukový signál. Tento signál zní tak dlouho, dokud pacient nevrátí hlavu do správné polohy. Pacient se může ihned po operaci bez omezení libovolně pohybovat a velice rychle se naučí za všech okolností udržet hlavu v takové poloze, aby přístroj nevydával zvukový signál. Během jednoduchého monitoringu si monitorovací jednotka ukládá do vnitřní paměti data o poloze hlavy pro případ pozdějšího využití – např. pro následnou kontrolu pacienta lékařem.

2. Online monitoring – připojení a aktivace přenosné monitorovací jednotky je stejné jako v předchozím případě, ale navíc lékař stiskne ještě tlačítko 2 pro zahájení bezdrátové komunikace (obr. 3). Dále musí být k dispozici libovolný počítač s nainstalovaným programem a připojeným bezdrátovým USB komunikátorem. Pokud je pacient s nasazenou přenosnou monitorovací jednotkou v dosahu počítače s bezdrátovým komunikátorem (t.j. zpravidla pokud pacient po operaci zůstává hospitalizovaný na oční klinice), může lékař nebo sestra ve své pracovně sledovat na displeji počítače v reálném čase aktuální polohu hlavy pacienta. Dosah bezdrátového komunikátoru je velmi individuální (desítky až stovky metrů) a značně závisí na stavební konstrukci budovy, kde se oční klinika nachází (sádrokarton, cihly, železobeton apod.).

3. Offline komunikace (analýza dat, úpravy nastavení přístroje) – vyžaduje libovolný počítač s nainstalovaným programem a připojeným bezdrátovým komunikátorem. Používá se např. v případě, kdy pacient odejde po operaci domů i s přenosnou monitorovací jednotkou upevněnou na hlavě, která mu pomáhá udržovat doporučenou polohu hlavy a veškeré záznamy o poloze hlavy ukládá do své vnitřní paměti. Jakmile se pacient dostaví na kontrolu k očnímu lékaři, ten spustí ve svém počítači program, který naváže prostřednictvím připojeného bezdrátového USB komunikátoru spojení počítače s přenosnou monitorovací jednotkou (na té je nutno stisknout tlačítko 2 pro aktivaci komunikace). Data o poloze hlavy v uplynulém období se z paměti přenosné monitorovací jednotky přenesou do počítače a lékař může pomocí různých grafických a statistických analýz snadno zjistit, jak pacient dodržoval doporučenou pooperační polohu hlavy (obr. 4, 5). V tomto režimu mohou pokročilí uživatelé systému rovněž nastavovat parametry monitoringu polohy hlavy, které se uloží do paměti přenosné monitorovací jednotky (např. nastavení obvodu reálného času, limitní velikost úhlové odchylky, rychlost vzorkování, identifikační údaje pacienta aj.). Nastavování parametrů ale není nutné, přístroj má předdefinované nastavení, které považuje autorský kolektiv na základě svých zkušeností s přístrojem za optimální. Dále je v tomto režimu také možné zjistit informace o stavu přenosné monitorovací jednotky, jako je např. napětí baterie nebo zbývající volná paměť pro ukládání záznamů.


Diskuse
Řada očních chirurgů doporučuje svým pacientům, aby po některých typech vitreoretinálních operací (především po pars plana vitrektomii s vyplněním sklivcového prostoru expanzivním plynem) udržovali po různě dlouhou dobu určitou doporučenou polohu hlavy (např. Eckardt 2, Harris (3) nebo Kolář (4, 5). Účelem tohoto polohování je, aby bublina expanzivního plynu tlačila co nejvíce na příslušné místo sítnice (např. na trhlinu v sítnici, na odchlípenou sítnici, na makulární díru apod.). Naopak nežádoucí je taková poloha, kdy bublina plynu tlačí např. na zadní plochu čočky (poloha vleže na zádech). Různí oční chirurgové se liší v názoru na ideální délku pooperačního polohování a na velikost jeho významu pro dobrý výsledek operace a pro eliminaci některých nežádoucích pooperačních komplikací (sekundární glaukom, rozvoj katarakty) – z mnoha autorů viz např. Tornambe (8) nebo Carvounis (1) versus Eckardt (2) nebo Harris (3).
Dosavadní zařízení, která pomáhají pacientům udržet správnou polohu hlavy po vitreoretinálních operacích, jsou na principu mechanické fixace hlavy v určité poloze. V České republice se příliš nerozšířila, avšak v některých zemích jsou značně populární. Jedná se o nejrůznější opěrky hlavy, polohovací křesla nebo lůžka, mnohdy s různými zrcadlovými systémy pro sledování okolí nebo třeba televize (6, 7, 9). Tyto systémy však neumožňují volný pohyb pacienta.
Autoři článku se domnívají, že oproti mechanickým systémům má nově vyvinutý elektronický systém řadu pozitiv. Jeho použití je velmi jednoduché, pacient není vůbec nijak omezován v pohybu a již během několika minut se naučí, jaká poloha hlavy je správná. Systém navíc umožňuje kontrolu polohy hlavy také ve spánku, takže nemůže dojít k tomu, že se pacient ve spánku mimoděk otočí na záda a leží třeba několik hodin ve zcela nevhodné poloze. Po připojení přístroje k počítači prostřednictvím bezdrátového komunikátoru pak lékař získává možnost analýzy dat a zhodnocení, zda a jak pacient dodržuje doporučený pooperační režim. Po dobu pobytu pacienta na oční klinice může personál sledovat polohu hlavy pacienta na monitoru počítače a nemusí jej chodit kontrolovat na pokoj.
Závěr
Autoři splnili cíl své práce a vyvinuli elektronický systém, který pomáhá pacientům po některých vitreoretinálních operacích udržovat správnou pooperační polohu hlavy doporučenou očním chirurgem. První zkušenosti s využitím systému v běžné klinické praxi a s jeho přínosem pro vitreoretinální chirurgii budou publikovány v následném sdělení.
Podpořeno grantem GAČR 102/08//1373.
Do
redakce doručeno dne 13. 12. 2010
Do
tisku přijato dne 10. 2. 2011
MUDr. Igor Vícha, Ph.D.
Oční
klinika LF MU a FN Brno
Jihlavská
20
625
00 Brno
e-mail:
ivicha@fnbrno.cz
Zdroje
1. Carvounis, P. E., Kopel, A. C., Kuhl, D. P. et al.: 25-gauge Vitrectomy Using Sulfur Hexafluoride and No Prone Positioning for Repair of Macular Holes. Retina, 2008, 28(9): 1188–1192.
2. Eckardt, C., Eckert, T., Eckardt, U. et al.: Macular Hole Surgery with Air Tamponade and Optical Coherence Tomography Based Duration of Face-Down Positioning. Retina, 2008, 28(8): 1087–1096.
3. Harris, M. J., De Bustros, S., Michels, R. G.: Treatment of Retinal Detachments Due to Macular Holes. Retina, 1984, 4(3): 144–147.
4. Kolář, P., Vižďová, D.: Chirurgická terapie idiopatické makulární díry. In Sborník 11. Vejdovského olomouckého vědeckého dne. Olomouc: Univerzita Palackého, 2010, s. 32. ISBN 978-80-244-2256-5.
5. Kolář, P., Vlková, E.: Dlouhodobé výsledky chirurgického řešení idiopatické makulární díry s peelingem vnitřní limitující membrány. Čes. a Slov. Oftalmol., 2006, 62(1): 34–41.
6. Ophthalmic Support Systems of Chicago, http://oss-chicago.com/service.htm, bez uvedení data
7. Rodanant, N., Thompson, Ch., Freeman, W. R.: A Compact, Inexpensive Face-Down Positioning Device. Retina, 2002, 22(2): 242–244.
8. Tornambe, P. E., Poliner, L. S., Grote, K.: Macular Hole Surgery without Face-Down Positioning: A Pilot Study. Retina, 1997, 17(3): 179–185.
9. Vitrectomy Support Solutions, http://www. mylivingneeds.com/vitrectomy.htm, bez uvedení data.
Štítky
OftalmológiaČlánok vyšiel v časopise
Česká a slovenská oftalmologie

2011 Číslo 1
- Pomocné látky v roztoku latanoprostu bez konzervačních látek vyvolávají zánětlivou odpověď a cytotoxicitu u imortalizovaných lidských HCE-2 epitelových buněk rohovky
- Konzervační látka polyquaternium-1 zvyšuje cytotoxicitu a zánět spojený s NF-kappaB u epitelových buněk lidské rohovky
- Dlouhodobé výsledky lokální léčby cyklosporinem A u těžkého syndromu suchého oka s 10letou dobou sledování
- Syndrom suchého oka
- Cyklosporin A v léčbě suchého oka − systematický přehled a metaanalýza
Najčítanejšie v tomto čísle
- Výskyt kardiovaskulárních onemocnění u pacientů s pseudoexfoliativním syndromem a pseudoexfoliativním glaukomem
- Současné možnosti náhrady vidění nevidomých pacientů pomocí arteficiálních neuroprotéz
- Efektivita hluboké sklerektomie s implantací T-Fluxu – dlouhodobé výsledky
- Katarakta po úraze bleskom