
Uplatnění robotického systému da Vinci v cévní chirurgii
The da Vinci robot in the field of vascular surgery
Introduction:
The aim of this study was to evaluate the clinical experience with 379 robot-assisted vascular procedures performed from November 2005 to December 2016 at our institution.
Methods:
A total of 366 cases (96.6%) were successfully completed using the robotic surgical systems da Vinci Standard and da Vinci Xi.
Results:
Conversion was necessary in 13 patients (3.4%). The 30-day mortality was 0.26% and 2 (0.5%) late prosthetic infections occurred.
Conclusions:
From a practical point of view, the greatest advantage of robot-assisted procedures has been the speed and relative simplicity of vascular anastomosis construction. Our experience with robot-assisted surgery has demonstrated the safety and feasibility of this technique in different areas of vascular surgery.
Key words:
robotic vascular surgery − aortic and non-aortic surgery
Authors:
P. Štádler; L. Dvořáček; P. Vitásek; P. Matouš
Authors‘ workplace:
Oddělení cévní chirurgie Nemocnice Na Homolce
primář: prof. MUDr. P. Štádler, Ph. D.
Published in:
Rozhl. Chir., 2017, roč. 96, č. 2, s. 63-68.
Category:
Original articles
Overview
Úvod:
Účelem této práce bylo klinické vyhodnocení 379 roboticky asistovaných cévních operací, které byly provedeny od listopadu 2005 do prosince 2016.
Metody:
Celkem 366 výkonů (96,6 %) bylo úspěšně dokončeno roboticky s použitím robotického systému da Vinci standard a da Vinci Xi.
Výsledky:
Ve 13 případech (3,4 %) musela být operace konvertována. 30denní mortalita v uvedeném souboru byla 0,26 %, v pozdním sledování byla dvakrát (0,5 %) zaznamenána infekce cévní náhrady.
Závěr:
Z praktického hlediska lze říci, že největší výhodou robotických cévních operací je relativní jednoduchost zhotovení cévní anastomózy. Zkušenosti s robotickou chirurgií demonstrují možnosti této techniky v různých oblastech cévní chirurgie.
Klíčová slova:
robotická cévní chirurgie − aortální a neaortální chirurgie
Úvod
Minimálně invazivní operace představují v chirurgii atraktivní alternativu a jsou u pacientů oblíbeny, zvláště z důvodu příznivého kosmetického efektu. Robotické operace v kardiovaskulární chirurgii se postupně stávají akceptovanými a v některých indikacích i standardními léčebnými postupy. V řadě klinických situací je použití robotického systému jedinou cestou, jak aplikovat minimálně invazivní chirurgické postupy do oboru kardiovaskulární chirurgie. Minimálně invazivní chirurgické postupy v kardiovaskulární chirurgii, stejně jako v ostatních chirurgických oborech, snižují riziko peroperačních komplikací, zkracují dobu pobytu na jednotkách intenzivní péče, zkracují hospitalizaci a pracovní neschopnost a snižují spotřebu krevních derivátů a dále zvyšují komfort pacienta a urychlují návrat k běžným aktivitám. V souvislosti s příchodem nového robotického systému da Vinci Xi je možné tyto výhody poskytnout většímu počtu pacientů v širších indikacích.
Autoři prezentují sestavu 379 roboticky asistovaných cévních zákroků, které provedli od října 2005 do prosince 2016. Robotické operace v oblasti aorty a pánevních tepen představovaly 90 % výkonů v uvedeném souboru.
Metody
Robotický systém byl původně vyvinut pro potřeby armády USA a od roku 2000 se objevuje i v civilním světě. Robotika je v celosvětovém měřítku vcelku běžně používána v různých chirurgických oborech, ale její uplatnění v cévní chirurgii je poměrně málo časté. Robotický systém umožňuje výrazně zlepšit přesnost chirurgického výkonu, eliminuje třes rukou, prostřednictvím 3D obrazu zajišťuje přesný obraz a snižuje rozsah operačního traumatu. Robotické operační systémy usnadňují některé obtížné operační zákroky v různých chirurgických oborech. Pracovní konce robotických nástrojů umožňují s využitím Endo-Wrist technologie manipulaci i v hůře přístupných oblastech, což představuje jednu z velkých výhod tohoto zařízení. Robotický systém je stále technologicky vylepšován a v současné době mají chirurgové k dispozici zcela nový typ s označením da Vinci Xi, který má menší robotická ramena na jedné platformě, delší robotické nástroje, do určité míry automatické nastavení robotických ramen pro různé typy operačních zákroků, možnost záměny umístění kamery v portech a řadu dalších vylepšení, která umožňují provádění stále složitějších operací napříč chirurgickými obory (Obr. 1).

Cévní robotická chirurgie
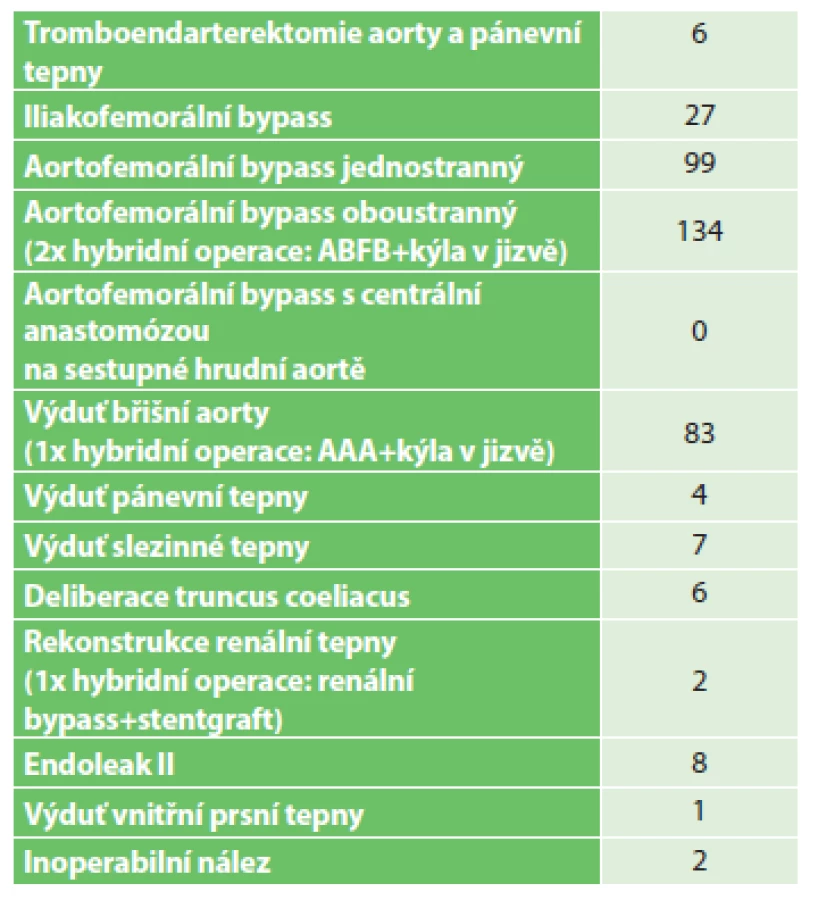
Z cévně chirurgického hlediska můžeme konstatovat, že lze roboticky úspěšně provádět cévní anastomózu v aortoiliacké oblasti i na viscerálních tepnách, a to dokonce zásadně snadněji než při klasické laparoskopické operaci [1]. Další možností je odstranění aterosklerotických hmot z lumina tepny, které mohou způsobit její zúžení, a robotický systém je tedy možné využít k tromboendarterektomii velkých tepen a následně i pro uzávěr takto desobliterovaných tepen cévní záplatou. Základní oblastí pro robotickou cévní chirurgii jsou rekonstrukční výkony v oblasti břišní aorty a pánevních tepen v důsledku obliterujícího postižení tepen a operace výdutí břišní aorty (AAA). V případě AAA se nejedná jen o provádění vlastních cévních anastomóz, ale i o odstranění trombotických hmot z vaku výdutě, uzávěr lumbálních tepen, které po otevření vaku výdutě zpětně krvácejí, a nakonec i o suturu vaku výdutě aorty po její rekonstrukci. V dutině břišní je pak na závěr u všech výše popsaných výkonů provedena robotická sutura retroperitonea. Velice zajímavé je použití robotického systému při rekonstrukci viscerálních tepen, například při operaci výdutě slezinné tepny nebo rekonstrukci ledvinné tepny, deliberaci truncus coeliacus, ošetření endoleaku po endovaskulárních zákrocích či při některých hybridních výkonech, které patří také do spektra našich uváděných robotických cévních operací. Ojedinělým výkonem pak byla i robotická intervence v oblasti výdutě vnitřní prsní tepny (Tab. 1).
Nejjednodušším operačním přístupem roboticky asistovaných výkonů v aortoiliacké oblasti je modifikovaný transperitoneální přístup [2]. Operační konzola je v naprosté většině případů umístěna na pravé straně pacienta.
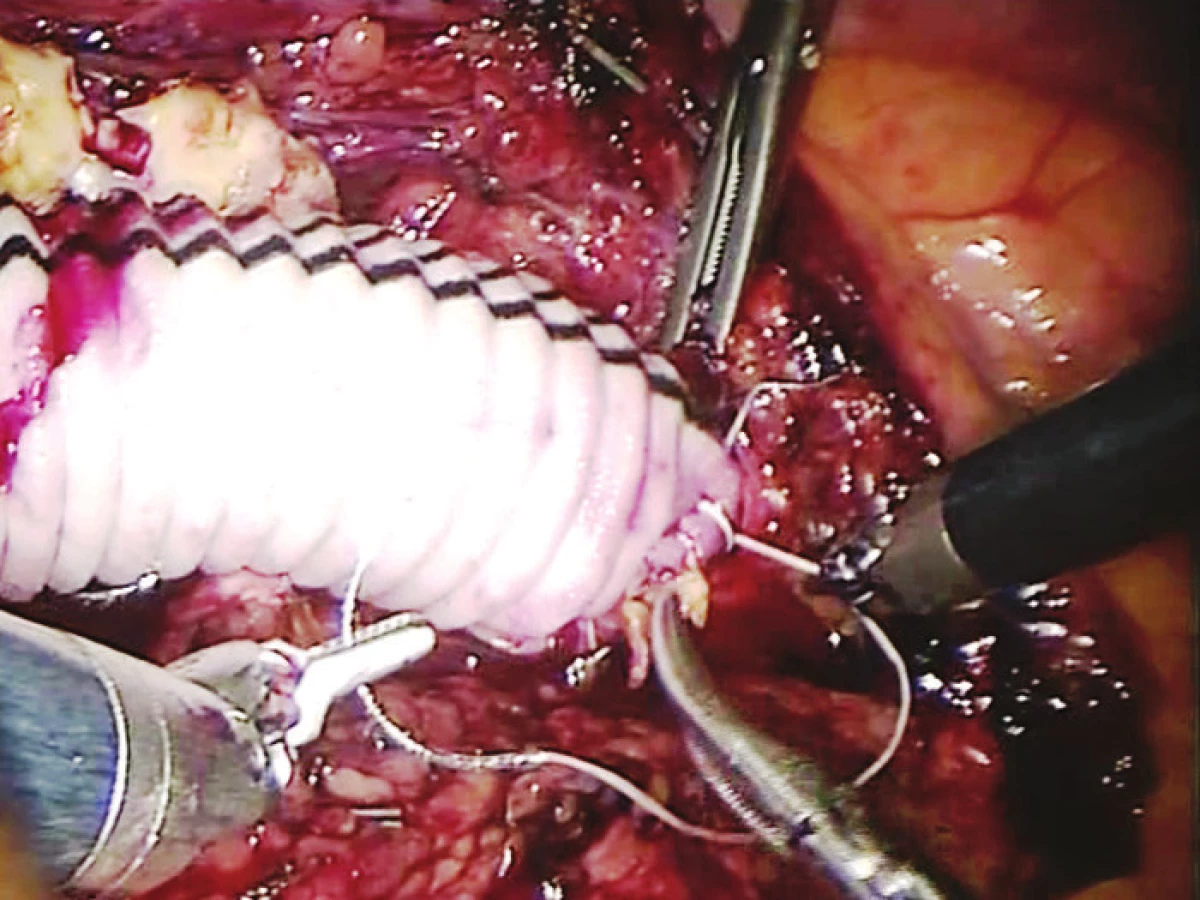
Tromboendarterektomie aorty a pánevní tepny bývá obecně prováděna chirurgicky velice ojediněle. Stejná situace platí i pro robotickou chirurgii. Naprostá většina izolovaných stenotických postižení v této oblasti je indikována k angioplastice. Pomocí robotických nástrojů (nejčastěji jehelec a disektor) je provedena standardně tromboendarterektomie a po jejím dokončení je arteriotomie nejčastěji uzavřena s použitím protetické záplaty (Obr. 2).
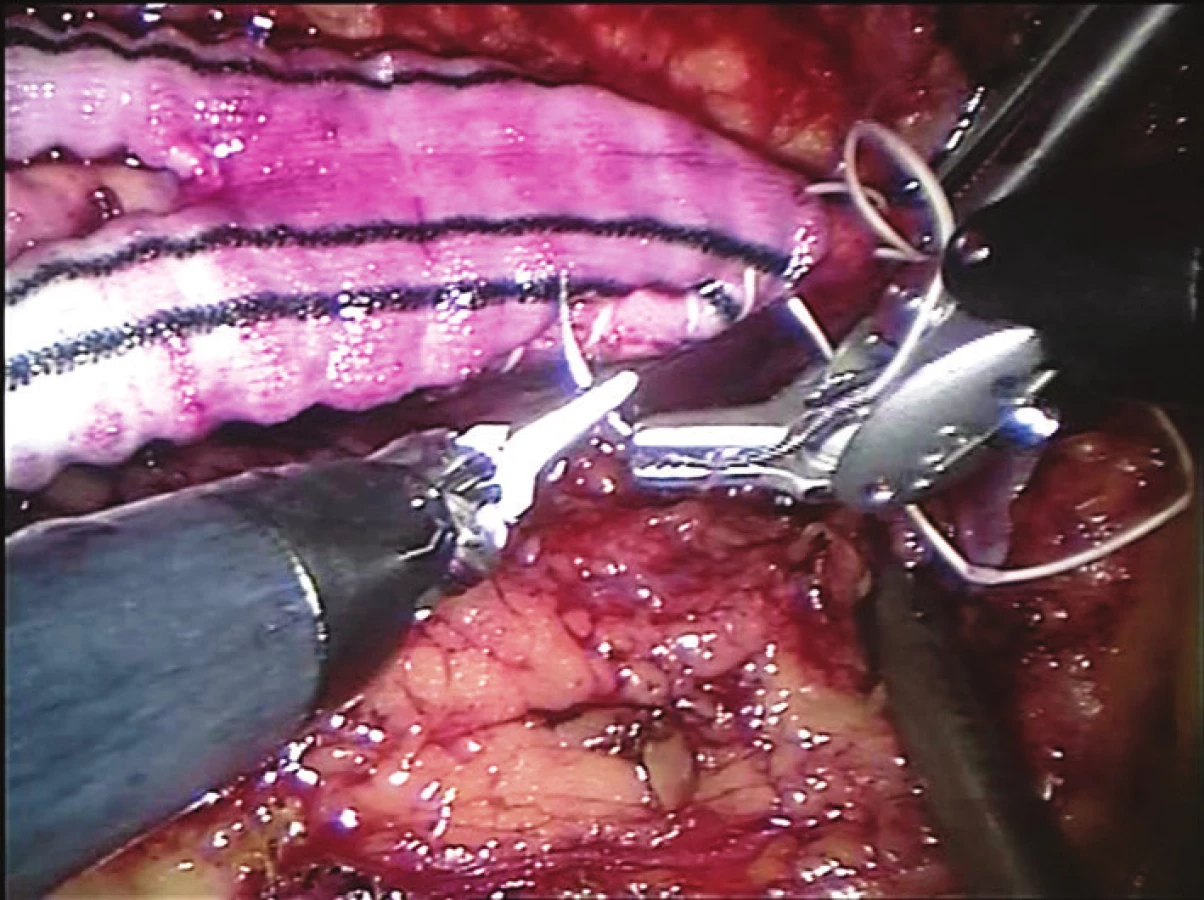
Iliakofemorální a aortofemorální bypassy představují častý typ roboticky asistované cévní rekonstrukce a tvoří téměř 70 % robotických cévních operací (Obr. 3). Iliakofemorální rekonstrukce jsou indikovány při uzávěru zevní pánevní tepny a průchodné společné pánevní tepně. Jednostranný aortofemorální bypass pak při kompletním uzávěru příslušné pánevní tepny a aortobifemorální (ABF) bypass při postižení obou pánevních tepen. Centrální anastomóza end to side bývá u zmíněných rekonstrukcí nejčastější, ale je třeba zmínit i anastomózu end to end, která je sice typická při řešení aneuryzmatických postižení, ale může mít své opodstatnění i u ABF. Je to hlavně v případě souběhu uzávěru pánevních tepen a současného výskytu dilatace terminálního úseku břišní aorty.
Aortofemorální bypass s centrální anastomózou na sestupné hrudní aortě
Představuje zatím stále ještě do určité míry klinický experiment, ale zcela jistě pootevírá i tuto možnost k řešení cévní problematiky pomocí robotického systému [3]. V úvahu připadá chronicky uzavřená předcházející aortofemorální rekonstrukce s opakovanými intervencemi nebo subrenální uzávěr s těžkým aterosklerotickým postižením aorty suprarenálně.
Bypass s centrální anastomózou na sestupné hrudní aortě a periferní na femorální tepně bývá nazýván torakofemorální bypass. Pro revaskularizaci obou dolních končetin navazuje pak na levostranný torakofemorální bypass ještě bypass femorofemorální zkřížený. Tato technika je alternativou aortofemorální rekonstrukce a má zaručeně lepší průchodnost než axillofemorální bypass, který bývá standardně indikován při nemožnosti provedení aortofemorální rekonstrukce. Toto je jediný typ robotické cévní rekonstrukce, která není v uvedeném souboru autorů obsažena.
Výduť břišní aorty
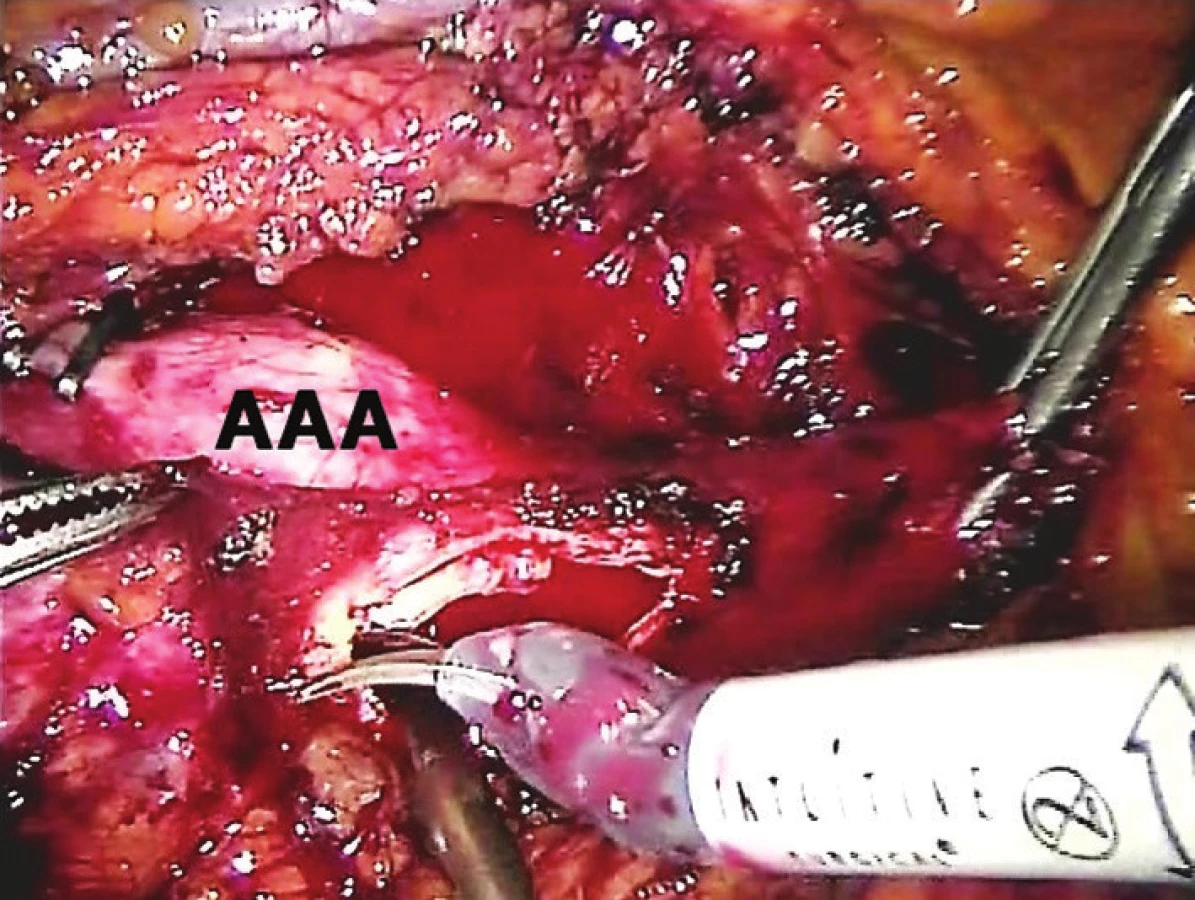
Roboticky asistovaná resekce a náhrada AAA již představuje náročnější operační výkon, který vyžaduje dostatečnou zkušenost operatéra jak v oblasti otevřené chirurgie, tak hlavně v chirurgii robotické [4]. Na druhou stranu je nutné zmínit, že aortofemorální rekonstrukce a operace AAA patří k nejčastějším roboticky asistovaným cévním výkonům. Roboticky můžeme provést jak aorto-aortální náhradu, tak i náhradu aortoiliackou při postižení břišní aorty a pánevních tepen (Obr. 4, 5). Po preparaci aorty a pánevních tepen v potřebném rozsahu, obvykle k levé renální žíle, obcházíme krček aorty tak, aby zde mohla být naložena centrální svorka. Snažíme se vyhledat a uzavřít pomocí klipů lumbální tepny na levé straně aorty. Při aorto-aortální náhradě je našita centrální a následně periferní anastomóza, při aortobiiliacké substituci je po centrální anastomóze nejdříve našita pravá periferní a pak levá periferní anastomóza.
Výduť pánevní tepny
Izolovaná výduť pánevní tepny je poměrně vzácné onemocnění. Při robotické operaci používáme v tomto případě čtyři robotická ramena, z nichž nástroj jednoho z nich funguje jako retraktor v oblasti pánve. Poloha pacienta i vlastní operační přístup i šití anastomóz jsou obdobné jako při operaci AAA.
Výduť slezinné tepny
Představuje sice zajímavý, ale opět poměrně málo se vyskytující robotický zákrok. Naprostá většina výdutí menšího rozsahu je řešena v této oblasti endovaskulárně. Při nálezu velké výdutě však nemusí být endovaskulární zákrok možný a většinou se nabízí jako řešení splenektomie. Pomocí robotického systému můžeme provést záchovnou operaci sleziny i při výduti, která dosahuje kolem 6 cm. Je nutno říci, že se musí jednat o nález, který není umístěn v hilu sleziny. Při této operaci je robotický systém umístěn atypicky šikmo za levým ramenem pacienta, u modelu da Vinci Xi je pozice stejná jako u aortální robotické chirurgie, tzn. na pravé straně pacientova těla. Ve většině případů provádíme po exkluzi výdutě přímou reanastomózu slezinné tepny.
Rekonstrukce renálních tepen
Rekonstrukce renálních tepen je v době angioplastiky sice další možnou, ale jen málo se vyskytující robotickou operací [5]. Tento zákrok je možné provést jako samostatný (výduť renální tepny) nebo jako součást dalšího výkonu, např. aortobifemorální rekonstrukce.
Deliberace truncus coeliacus
Syndrom komprese truncus coeliacus, který je známý jako Dunbarův syndrom, je vzácnou cévní anomálií, která vzniká na podkladě útlaku truncus coeliacus atypicky probíhajícím ligamentum arcuatum medianum (LAM) a projevuje se zažívacími obtížemi. Pomocí robotického systému pronikáme přes gastrohepatické ligamentum k břišní aortě a po verifikaci jícnu postupujeme distálně k odstupu truncus coeliacus, kde pomocí elektrokoagulace nebo harmonického skalpelu přerušíme probíhající LAM [6].
Hybridní robotické výkony
V robotické cévní chirurgii se může jednat o kombinovaný výkon cévní a všeobecně chirurgický nebo čistě cévní zákrok. V kombinaci s všeobecnou chirurgií se může jednat o robotickou cévní operaci, např. AF bypass nebo AAA a pupeční kýlu nebo kýlu v jizvě po předcházející laparotomii [7]. V případě hybridních čistě cévních výkonů je nejjednodušší kombinace angioplastiky a cévní rekonstrukce nebo bederní sympatektomie a IF nebo AF bypass. Dále připadá v úvahu kombinace endovaskulárního zákroku (např. stentgraft hrudní aorty) a revaskularizace viscerální tepny (např. renální) nebo kombinace AF rekonstrukce s endarterektomií renální tepny [8]. K náročnějším výkonům pak patří hybridní operace výdutě torakoabdominální aorty u rizikových pacientů, kde by byl pro nemocného klasický otevřený přístup extrémně nebezpečný. Hybridní výkony jsou také popisovány i v robotické kardiochirurgii v kombinaci s angioplastikou koronárních tepen.
Ošetření endoleaku po implantaci stentgraftu
V úvahu připadá laparoskopické či robotické ošetření endoleaku prvního nebo druhého typu po endovaskulární léčbě AAA. Závažné jsou hlavně endoleaky, kdy dochází k dalšímu růstu vaku výdutě.
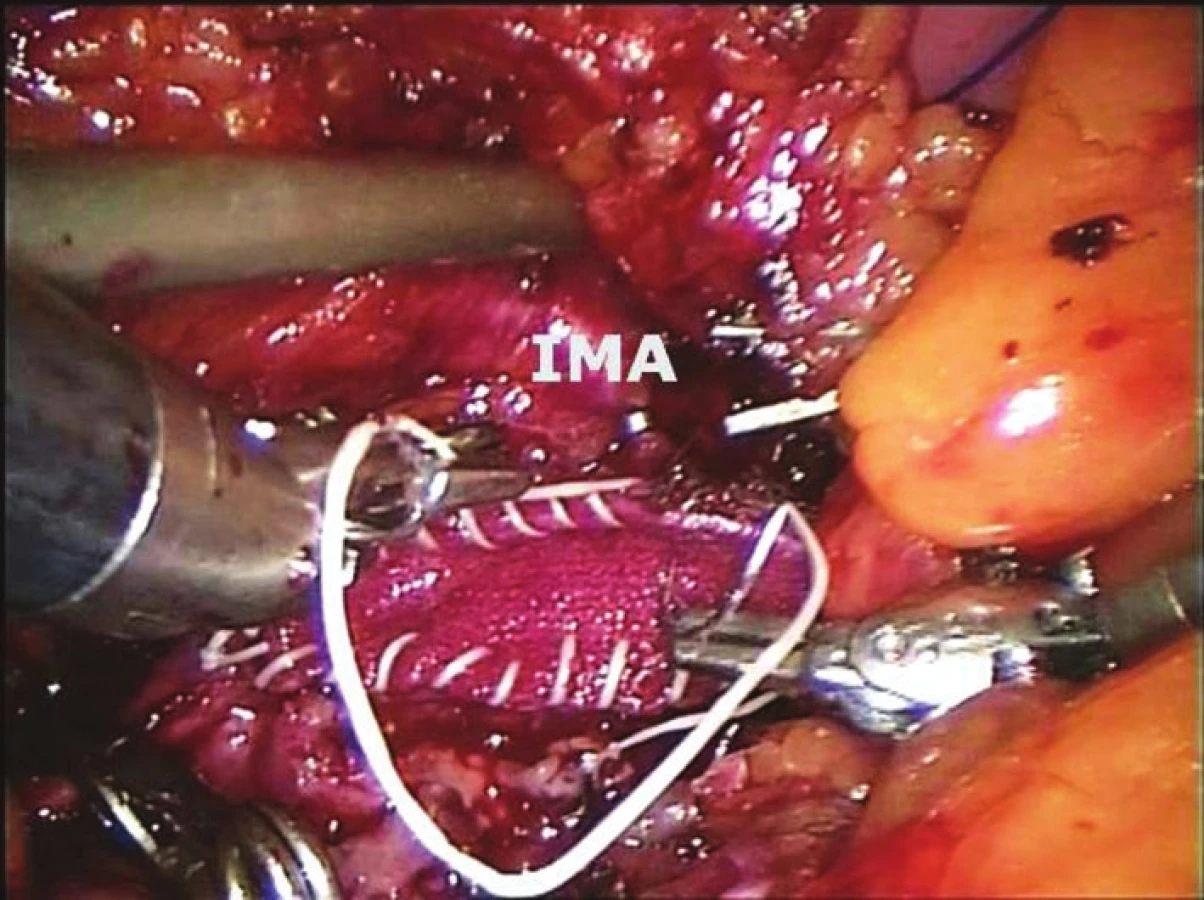
První typ endoleaku je charakterizován nedostatečnou těsností vlastního stentgraftu, nejčastěji centrální části. Druhý typ pak vzniká v důsledku zpětného toku tepen odstupujících z aorty. Endoleak II. typu po implantaci stentgraftu do subrenální aorty vzniká nejčastěji z průchodné arteria mesenterica inferior (IMA) nebo z lumbálních tepen. Průchodnou IMA lze ošetřit poměrně jednoduše laparoskopicky i roboticky [9]. Zvládnutí endoleaku z lumbálních tepen je složitější a zvláště pravostranné jsou pro laparoskopickou techniku těžko přístupné. Za těchto okolností lze k zrušení zpětného toku z lumbálních tepen použít robotický systém a všechny jeho přednosti [10]. Při ošetření endoleaku II. typu z lumbálních tepen je třeba zcela uvolnit vak AAA a zaklipovat nebo přerušit průchodné lumbální tepny. Operační přístup je shodný jako u AAA.
Výsledky
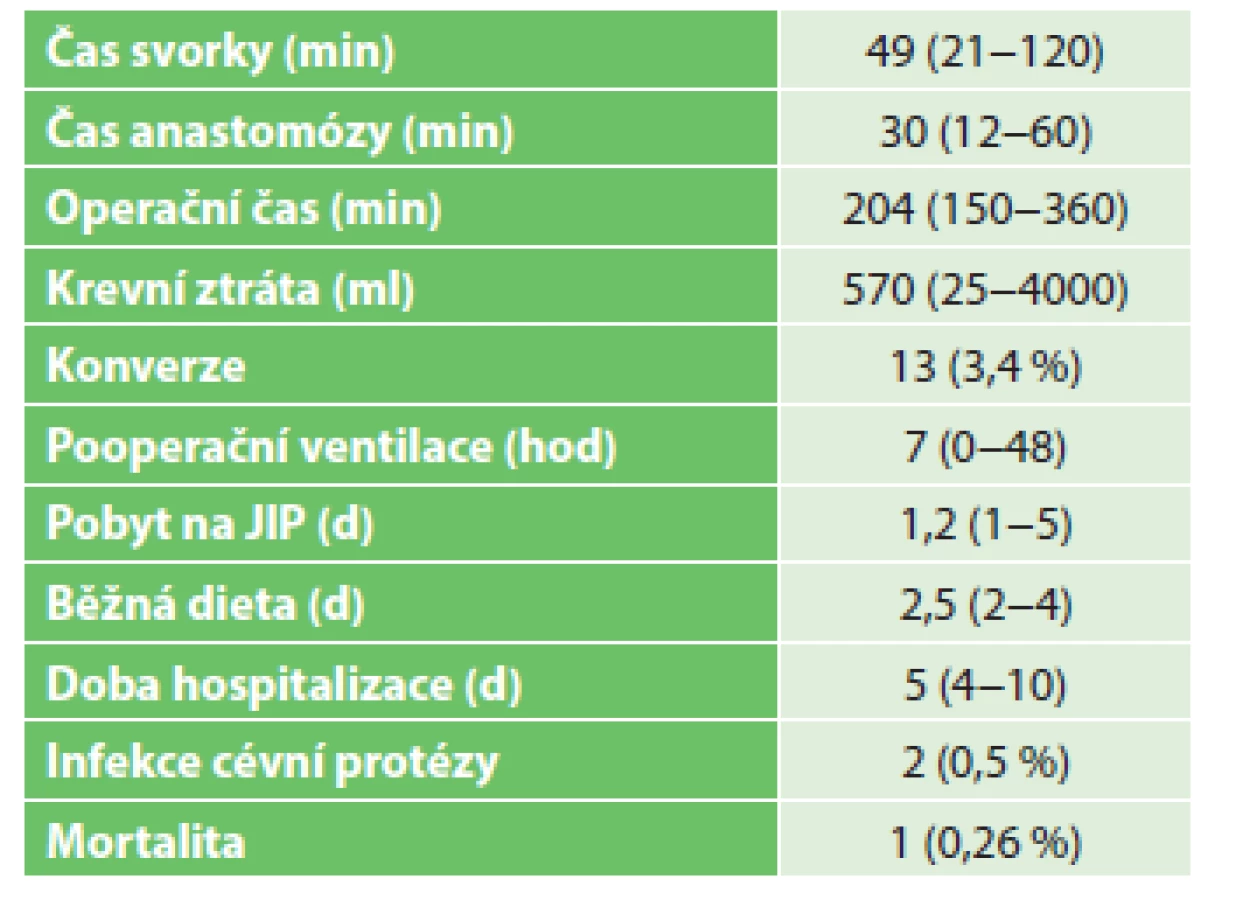
V období od listopadu 2005 do prosince 2016 bylo na Oddělení cévní chirurgie Nemocnice Na Homolce v Praze provedeno 379 roboticky asistovaných cévních operací. V uváděném souboru pacientů s poměrem mužů a žen 3 : 1, byla mortalita 0,26 %. Ve 13 případech (3,4 %) byla nutná konverze na klasickou operaci ve formě mini nebo plné laparotomie a u dvou pacientů (0,5 %) byla řešena pozdní infekce cévní protézy. Jednou (0,25 %) nastala během operace technická porucha robotického zařízení, v tomto případě byla operace dokončena laparoskopicky, a dvakrát (0,5 %) muselo být od operace ustoupeno pro inoperabilní nález v oblasti subrenální i suprarenální oblasti (neztlačitelná kalcifikovaná aorta) a z důvodu rozsáhlé periaortitidy. První pacient nemusel být indikován k extraanatomické rekonstrukci pro relativně dlouhý klaudikační interval, který činil 100−150 metrů, a byl převeden na plnou vazodilatační konzervativní léčbu. U druhého pacienta, kde byl plánován jednostranný aortofemorální bypass, byl proveden crossover bypass femorofemorální. Naprostou většinu všech roboticky asistovaných cévních rekonstrukcí tvoří operace v aortoiliacké oblasti (90 %). V ostatních 10 % pak jde o zákroky, které se obecně vyskytují zřídka, ale i zde vidíme přínos robotické chirurgie (Graf 1). Pomalu klesají počty iliakofemorálních rekonstrukcí, a to jednak z důvodu častějších endovaskulárních intervencí, ale i z podílu klasické laparoskopie v této oblasti. Naopak zvolna roste počet roboticky asistovaných AAA v důsledku narůstajících zkušeností. Peroperační a pooperační data jsou uvedena v Tab. 2. Průměrný operační čas byl v uváděném souboru 204 minut, průměrný čas potřebný pro šití anastomózy 30 minut a průměrný čas svorky 49 minut. Průměrná krevní ztráta byla 570 ml. Při srovnání časových intervalů u pacientů s obliterujícím postižením a AAA vidíme rozdíly hlavně v délce času naložené svorky (37 minut, resp. 93 minut), operačním času (194 minut, resp. 253 minut) a krevní ztrátě (320 ml, resp. 1210 ml). Pacienti byli převedeni na běžnou dietu mezi druhým a třetím pooperačním dnem a průměrná doba hospitalizace byla 5 dnů.

Diskuze
Miniinvazivní chirurgie je stále častěji uplatňována v různých chirurgických oborech. Je mezi pacienty velmi oblíbená, zvláště z kosmetického hlediska. Z medicínského hlediska pozorujeme příznivý efekt všech výhod miniinvazivní chirurgie, zvláště zkrácení doby hospitalizace a rychlý návrat nemocného do běžného života.
Robotická chirurgie se dnes většinou vyvíjí jako multidisciplinární obor zahrnující různé operační obory a zároveň využívá veškerých předností minimálně invazivních metod. Jde zejména o urologii, kardiovaskulární chirurgii, ve všeobecné chirurgii jde nejčastěji o kolorektální chirurgii, dále gynekologii, hrudní chirurgii a onkochirurgii [11−14]. V poslední době je popisováno využití robota i v ORL, ortopedii a chirurgii štítné žlázy [15−16)]. V centrech robotické chirurgie bývá převážně multidisciplinární robotický operační sál, ve kterém se střídají jednotlivé chirurgické obory. S dalším rozvojem robotické chirurgie se ale začínají objevovat i jednooborová pracoviště v důsledku prudšího rozvoje určité robotické chirurgické specializace.
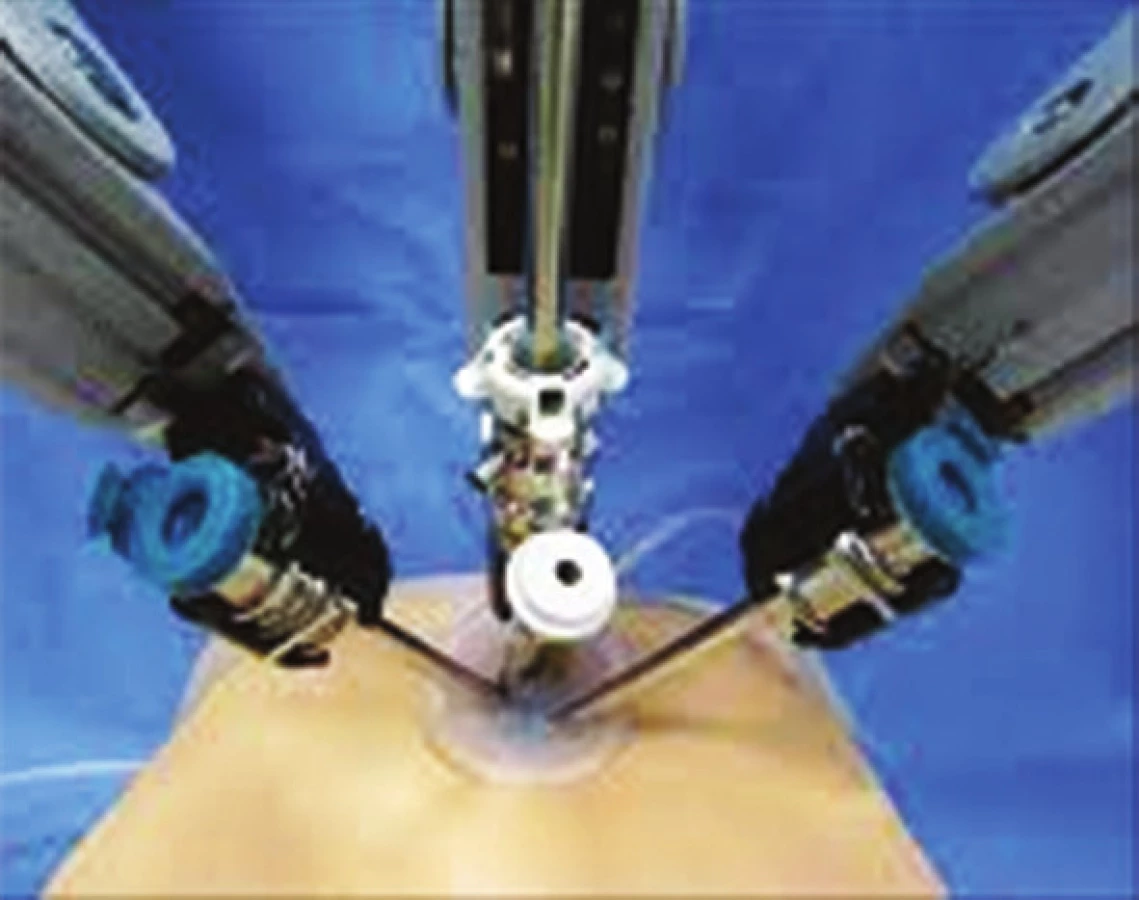
V dnešní době je při robotické operaci obvykle použito 4−7 vstupů přes tzv. trokáry. Tento počet je závislý na typu výkonu. V cévní chirurgii používáme větší počet vstupů, protože kromě asistentského portu jsou tu ještě vstupy pro cévní svorky. Další rozvoj laparoskopie a robotiky přinesl tzv. single port (Obr. 6). Stejně jako v laparoskopii jsou gynekologové průkopníky i v používání single portu. Tato technologie je brána jako další krok v rozvoji minimálně invazivní chirurgie [17]. Při tomto přístupu jsou kamera i nástroje instalovány do dutiny břišní přes jediný port. Rozvoj tohoto přístupu uspokojuje potřeby skutečné minimalizace kožních jizev. Při jeho použití v běžné laparoskopii s novějšími zakřivenými nástroji může poměrně často docházet ke kolizi mezi nástroji a hlavně omezuje takto vedené laparoskopické šití. Dalším možným krokem je právě využití robotické endo-wrist technologie a zkombinování single portu s robotickým systémem, který obecně nabízí zlepšenou ergonomii a rozsah pohybů. Zatím se dá předpokládat jen selektivní použití, které jistě není vhodné v případě prostorově rozsáhlých výkonů.
Závěr
Z praktického hlediska je v cévní chirurgii největším přínosem robotiky, která v současné době představuje nejmodernější způsob chirurgické léčby, rychlost zhotovení cévní anastomózy. Tím byla odstraněna největší nevýhoda laparoskopických cévních rekonstrukcí – dlouhý čas naložené cévní svorky na aortě. Zkrácením času nutného ke zhotovení anastomózy se zkrátí i doba dočasné ischemie dolních končetin při naložené aortální svorce. Tyto časy jsou velice podstatné pro srdeční zátěž i reperfuzi svalů a zásadně ovlivňují pooperační průběh, včetně morbidity a mortality. V současné době jsou tyto časy srovnatelné s klasickou cévní chirurgií a navíc právě s využitím všech výhod miniinvazivní chirurgie. Cévní pacient profituje hlavně z kratší doby hospitalizace a z možného brzkého návratu k běžným aktivitám i pracovní činnosti, kterou je prakticky možno provádět ve většině případů bez výraznějšího omezení. Nezanedbatelný je vynikající kosmetický efekt. S výhodou je možné používat tuto metodu i u obézních pacientů, kde je klasický výkon technicky náročný a často bývá porucha hojení rány po laparotomii. Zdá se, že minimálně invazivní cévní chirurgie vstoupila s použitím robotických systémů do zcela nového období, ve kterém se daří odbourat zásadní nedostatky cévní laparoskopie, které významně bránily jejímu většímu rozšíření.
Práce byla podpořena projektem IG150101
Konflikt zájmů
Autoři článku prohlašují, že nejsou v souvislosti se vznikem tohoto článku ve střetu zájmů a že tento článek nebyl publikován v žádném jiném časopise.
Prof. MUDr. Petr Štádler, Ph.D.
Roentgenova 2
150 30 Praha 5
e-mail: petr.stadler@homolka.cz
Sources
1. Nio D, Diks J, Linsen MAM, et al. Robot-assisted laparoscopic aortobifemoral bypass for aortoiliac occlusive disease: Early clinical experience. European Journal of Vascular and Endovascular Surgery 2005; 29 : 586–90.
2. Štádler P, Šebesta P, Vitásek P, et al. A modified technique of transperitoneal direct approach for totally laparoscopic aortoiliac surgery. Eur J Vasc Endovasc Surg 2006;3 : 266−9.
3. Bodner J, Wykypiel H, Wetscher G, et al. First experiences with the da Vinci operating robot in thoracic surgery. Eur J Cardiothorac Surg 2004;25 : 844−51.
4. Štádler P, Dvořáček L, Vitásek, et al. Is robotic surgery appropriate for vascular procedures? Report of 100 aortoiliac cases. Eur J Vas. Endovasc Surg 2008;36 : 401−4.
5. Giulianotti PC, Bianco FM, Addeo P, et al. Robot-assisted laparoscopic repair of renal artery aneurysms. J. Vasc Surg 2010;51 : 842−9.
6. Thoolen SJ, van der Vliet WJ, Kent TS, et al. Technique and outcomes of robot-assisted median arcuate ligament release for celiac artery compression syndrome. J Vasc Surg 2015;61 : 1278−84.
7. Štádler P, Vitásek P, Matouš P, et al. Hybridní roboticky asistovaná operace, aortobifemorální bypass s rekonstrukcí kýly v jizvě. Rozhl Chir 2008;11 : 590−2.
8. Stádler P, Dvoracek L, Vitasek P, et al. Robotic vascular surgery, 150 cases. Int J Med Robot 2010;6 : 394−8.
9. Lin JC, Eun D, Shrivastava A, et al. Total robotic ligation of inferior mesenteric artery for type II endoleak after endovascular aneurysm repair. Ann Vasc Surg 2009;23 : 255.
10. Štádler P, Dvořáček L, Vitásek P, et al. Robot assisted aortic and non-aortic vascular operations. Eur J Vasc Endovasc Surg 2016;52 : 22−8.
11. Bonatti J, Vetrovec G, Riga C, et al. Robotic technology in cardiovascular medicine. Nat Rev Cardiol. 2014;11 : 266−75.
12. Bokhari MB, Patel CB, Ramos-Valadez DI, et al. Learning curve for robotic-assisted laparoscopic colorectal surgery. Surg, Endosc 2011;25 : 855−60.
13. Feuer G, Hernandez P, Barker J. Surgical technique enhances the efficiency of robotic hysterectomy. Int J Med Robot 2011;7 : 1−6.
14. Patel VR, Abdul-Muhsin HM, Schatloff O, et al. Critical review of ‚pentafecta‘ outcomes after robot-assisted laparoscopic prostatectomy in high-volume centres. BJU Int 2011;108 : 1007−17.
15. Park YM, Lee WJ, Lee JG, et al. Transoral robotic surgery (TORS) in laryngeal and hypopharyngeal cancer. J Laparoendosc Adv Surg Tech 2009;19 : 361−8.
16. Lang JE, Mannava S, Floyd AJ, et al. Robotic systems in orthopaedic surgery. J Bone Joint Surg Br 2011;93 : 1296−9.
17. Kaouk JH, Goel RK, Haber GP, et al. Robotic single-port transumbilical surgery in humans: initial report. BJU Int 2009; 103 : 366−9.
Labels
Surgery Orthopaedics Trauma surgeryArticle was published in
Perspectives in Surgery

2017 Issue 2
- Possibilities of Using Metamizole in the Treatment of Acute Primary Headaches
- Metamizole at a Glance and in Practice – Effective Non-Opioid Analgesic for All Ages
- Metamizole vs. Tramadol in Postoperative Analgesia
Most read in this issue
- Roboticky asistovaná radikální prostatektomie – výsledky u 1500 operací
- Aneuryzma vena poplitea
- Robotická chirurgie v gynekologii
- Uplatnění robotického systému da Vinci v cévní chirurgii