
Vplyv roboticky asistovaného lokomočného tréningu na motorické funkcie pacientov s detskou mozgovou obrnou v závislosti od závažnosti postihnutia
The Influence of Robot–assisted Training on Motor Functions of the Patients with Children Palsy in Relation to the Severity of the Defects
The aim of study was to assess impact of RATT (robot-assisted treadmill training) on motor functions in outpatient and inpatient patients with bilateral spastic cerebral palsy (CP) depending on the severity of motor impairment. 51 patients with bilateral spastic CP, aged 4-27 years underwent 20 sessions of RATT during 4-6 week period using Lokomat® therapy. Patients were divided into two groups according to severity of motor impairment determined by the Gross Motor Function Classification Scale (GMFCS).
After completing 20 sessions we recorded an objective improvement in functional gait parameters and motor functions in mildly, as well as severely affected patients with bilateral spastic CP. The severity of motor impairment affects the amount of the achieved improvement.
Keywords:
robot-assisted treadmill training, cerebral palsy, gross motor function measure
Authors:
S. Klobucká 1; M. Kováč 2; E. Žiaková 1,3; R. Klobucký 4
Authors‘ workplace:
Rehabilitačné centrum Harmony, Bratislava
primárka MUDr. S. Klobucká, Ph. D.
1; Klinika neurológie, FNsP Nové Zámky
prednosta prof. MUDr. M. Kováč, CSc.
2; Slovenská zdravotnícka univerzita, FO a ZOŠ, Bratislava
vedúca katedry fyzioterapie PhDr. E. Žiaková, Ph. D.
3; Sociologický ústav, Slovenská akadémia vied, Bratislava
Mgr. R. Klobucký, Ph. D.
4
Published in:
Rehabil. fyz. Lék., 20, 2013, No. 3, pp. 150-160.
Category:
Original Papers
Overview
Cieľom štúdie
bolo hodnotenie vplyvu roboticky - asistovanej lokomočnej terapie na motorické funkcie u chodiaciach i nechodiacich pacientov s DMO v závislosti od závažnosti postihnutia. 51 pacientov (4-27 rokov) s bilaterálne spastickou formou detskej mozgovej obrny absolvovalo počas 4-6 týždňov 20 terapeutických jednotiek RATT v zariadení Lokomat®. Pacienti boli rozdelení do dvoch skupín podľa závažnosti postihnutia determinovanej škálou GMFCS (Gross Motor Function Classification Scale). Po absolvovaní terapie sme zaznamenali signifikantné (p <0,001) zlepšenie funkcií hrubej motoriky ako aj funkčných parametrov chôdze. Závažnosť postihnutia ovplyvnila výsledky terapie.
Kľúčové slová:
robot-assisted treadmill training (RATT), detská mozgová obrna, gross motor function measure
ÚVOD
Komplexná problematika detí s DMO si vyžaduje multidisciplinárny prístup zahŕňajúci spoluprácu neurológa, rehabilitačného lekára, fyzioterapeuta, ortopéda, ortopedického protetika, psychológa, logopéda, foniatra, oftalmológa a i., s náväznosťou na sociálnu výpomoc a špeciálnu pedagogiku. Veľmi dôležité je včasné zahájenie rehabilitácie, pričom jej základným prvkom je liečebná telesná výchova. V súčasnosti sa kladie čoraz väčší dôraz na aktívny prístup v terapii, vrátane intenzívneho, repetitívneho cieleného tréningu podporujúceho neuroplasticitu. Tréning lokomočných funkcií sa stal efektívnym prostriedkom na zlepšenie chôdze pri mnohých nielen neurologických ochoreniach a poraneniach. V uplynulom desaťročí došlo k markantnému vzostupu využitia robotickej terapie predovšetkým u pacientov po cievnych mozgových príhodách, cerebrospinálnych traumách a v neposlednom rade tiež u detí s detskou mozgovou obrnou.
Vychádzajúc z princípu motorického učenia, ktorý popisuje koreláciu medzi opakovaním činností a zlepšením motorickej funkcie, bola koncom 90-tych rokov (University Zurich, 1998) vyvinutá roboticky asistovaná lokomočná terapia pomocou počítačovo riadených elektronických ortéz.
Aktivácia spinálnych a supraspinálnych CPG (central pattern generators), ako sa popisuje v experimentoch na zvieratách, podporuje teoretický základ tohto terapeutického konceptu (5, 8, 12, 23). CPG sú aktivované nižšími mozgovými centrami (mozgový kmeň, bazálne gangliá), ktoré následne aktivujú svaly vykonávajúce cyklické a opakované chôdzové pohyby. Keďže vyššie mozgové centrá sú u detí s DMO často poškodené, predpokladá sa, že aktivácia CPG a automatické recipročné mechanizmy majú dôležitú úlohu v stimulácii chôdze pomocou lokomočného tréningu (23). Existenciu CPG u človeka by mohol podporiť aj fakt, že reflex chôdzového mechanizmu je zachovaný aj u anencefalických novorodencov (4, 10), avšak jednoznačný dôkaz stále chýba. Pre stimuláciu lokomočných centier v mieche je zásadné optimálne množstvo aferentných vzruchov. To môžeme dosiahnuť opakovaním pohybov dolných končatín v rytmickom fyziologickom vzorci (22).
Existuje niekoľko základných prístupov v rehabilitácii chôdze:
- tréning chôdze v teréne, conventional over-ground gait training (COGT),
- tréning s odľahčením hmotnosti tela s manuálnou asistenciou, body-weight-supported treadmill therapy (BWSTT),
- roboticky asistovaný tréning, robotic-assisted treadmill therapy (RATT).
Roboticky asistovaný lokomočný tréning nadväzuje na manuálne asistovaný tréning chôdze pomocou pohyblivého chodníka. V porovnaní s ním môžeme dosiahnuť predovšetkým konštantný a reprodukovateľný aferentný vstup, presnú kontrolu a možnosť regulácie hlavných parametrov chôdzového stereotypu a výrazné uľahčenie práce s pacientom s poruchou alebo neschopnosťou chôdze. Tréning môže byť vďaka tomu dlhší, liečba efektívnejšia a dá sa očakávať rýchlejšie dosiahnutie pozitívnych výsledkov.
Viacerí autori preukázali účinnosť roboticky asistovanej lokomočnej terapie na zlepšenie chôdze u dospelých po cievnych mozgových príhodách a po úrazoch mozgu a miechy (15, 16, 25, 27, 39, 41). Predbežné štúdie poukazujú na sľubný efekt RATT aj u pacientov s inými neurologickými ochoreniami, napr. s roztrúsenou sklerózou alebo Parkinsonovou chorobou (2, 37).
RATT (robotic-assisted treadmill training) sa od r. 2005 začal využívať taktiež u detských pacientov s poruchami motorických funkcií rôznej etiológie, najčastejšie u detí s DMO. V non-randomizovaných štúdiách s RATT u detí s centrálne podmienenou poruchou chôdze použitím Lokomatu® sa preukázalo zlepšenie motorických funkcií, rýchlosti a vytrvalosti pri chôdzi ako aj stereotypu chôdze (4, 5, 6, 26, 27).
V recentných štúdiách je pri tréningu chôdze hodnotená v rámci škály GMFM len dimenzia D (stoj) a E (chôdza, beh, skoky). Avšak po absolvovaní série terapeutických jednotiek RATT sme u našich pacientov pozorovali okrem iného tiež stabilizáciu trupového svalstva, čo sa odrazilo v zlepšení sedu, lezenia a otáčania. Preto sme sa v tejto práci rozhodli testovať u každého pacienta všetky dimenzie škály GMFM-88 (A, B, C, D, E).
Cieľom prezentovanej štúdie bolo posúdiť a zhodnotiť možnosti uplatnenia cieleného intenzívneho roboticky asistovaného lokomočného tréningu za pomoci elektronicky riadených ortéz v systéme Lokomat® v ambulantnej rehabilitácii motorických porúch pacientov s DMO. Taktiež sme sa pokúsili dokumentovať efektívnosť roboticky asistovanej lokomočnej terapie v systéme Lokomat® na ovplyvnenie motorických funkcií a funkčných parametrov chôdze u pacientov s DMO. Zároveň sme hodnotili vplyv RATT na motorické funkcie pacientov s DMO v závislosti od závažnosti postihnutia.
METÓDY
Výskum sa uskutočnil v období od marca 2008 do septembra 2011 v Rehabilitačnom centre Hormony v Bratislave. 51 pacientov (28 chlapcov a 23 dievčat) s bilaterálne spastickou DMO vo veku 4,3 - 27 rokov (priemerný vek 10,6 rokov, SD 5,6) absolvovalo ambulantne 20 terapeutických jednotiek RATT pomocou elektronicky riadených ortéz v systéme Lokomat®. Model pre dospelých bol použitý u 12 pacientov, pre deti u 39 pacientov.
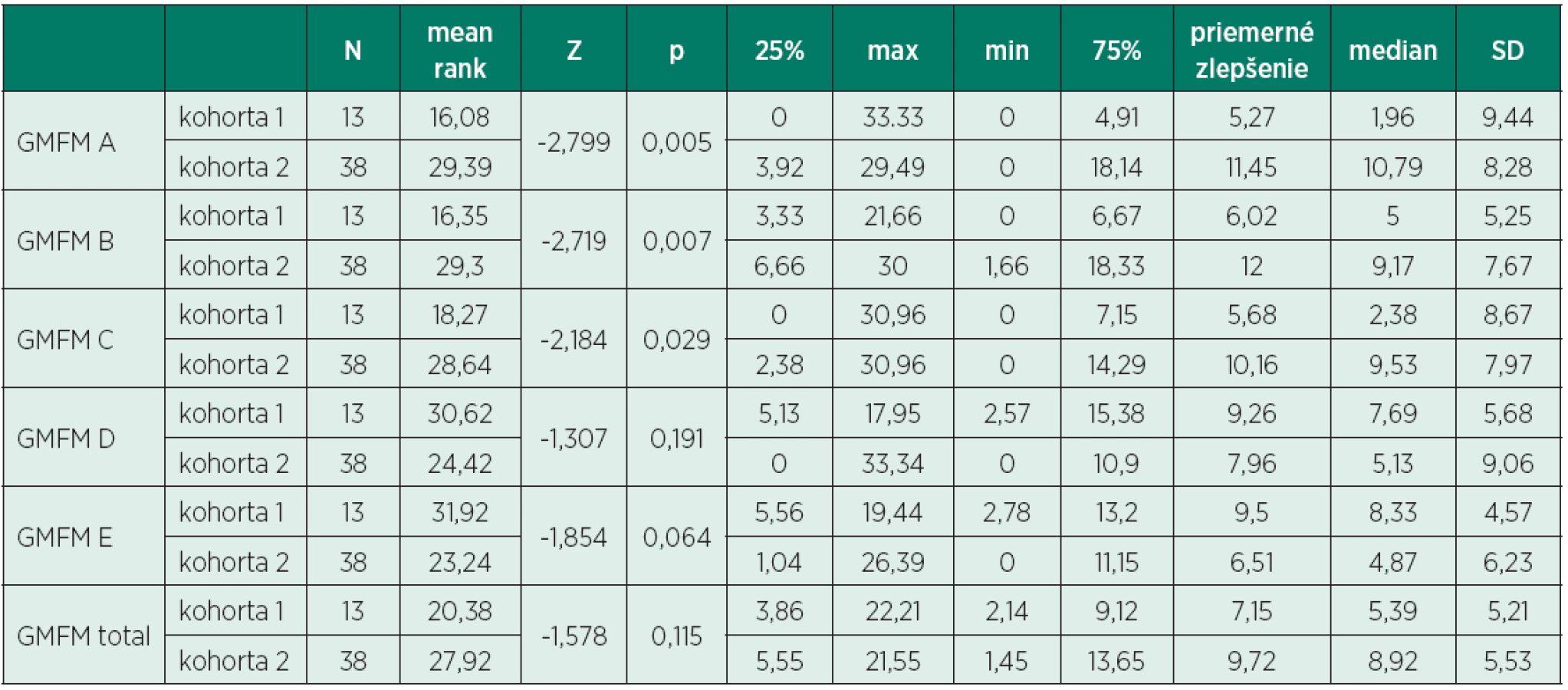
Závažnosť postihnutia bola determinovaná prostredníctvom GMFCS škály (29). Pacienti s GMFCS úrovňou I, II (n= 13) boli hodnotení ako mierne postihnutí. Pacienti s GMFCS úrovňou III, IV a V boli hodnotení ako závažnejšie postihnutí (n= 38) (tab. 1).

Do štúdie boli zaradení pacienti s bilaterálne spastickou formou DMO. Diagnózu stanovil detský neurológ podľa MKCH - 10. Dĺžka femuru bola minimálne 21 cm, čo koreluje s vekom približne 4 roky. Pacienti museli byť schopní spoľahlivo signalizovať bolesť, strach, alebo prípadný dyskomfort počas liečby.
Vylučujúce kritériá: Do štúdie neboli zaradené deti s fixovanými kontraktúrami DK, pacienti po aplikácii botulotoxínu (BTX) do spastických svalov, alebo ktorí absolvovali chirurgickú (ortopedickú) intervenciu počas 3 mesiacov pred začatím liečby v Lokomate®. Kontraindikáciou boli taktiež závažné ochorenia kardiovaskulárneho systému, akútne alebo progresívne neurologické ochorenia, nespolupracujúci, agresívni pacienti, ťažký kognitívny deficit, nemožnosť prispôsobenia ortézy pacientovi, ťažké väzivové skrátenie svalu v oblasti DK, nekonsolidované fraktúry, ťažká osteoporóza, artrodéza bedrového, kolenného, členkového kĺbu, osteomyelitída, výrazná asymetria končatín, extrémna dysproporcia rastu dolných končatín alebo chrbtice.
Pacienti alebo ich právni zástupcovia boli informovaní o priebehu a okolnostiach roboticky asistovanej lokomočnej terapie ako aj o použití výsledkov testov pre účely výskumu. U každého pacienta (od rodičov, prípadne zákonných zástupcov) bol vyžiadaný písomný informovaný súhlas.
POPIS ZARIADENIA
LOKOMAT® je medicínsko – technické zariadenie, ktoré nadväzuje na manuálne asistovaný tréning chôdze pomocou pohyblivého chodníka. Pozostáva z niekoľkých základných komponentov: pohyblivého chodníka (treadmill), špeciálneho patentovaného závesného systému a elektronicky riadených ortéz. Elektromechanický odľahčovací systém monitoruje a prispôsobuje odľahčenie v reálnom čase na požadovanej úrovni. Pohyblivé časti sú ovládané tromi počítačmi a špeciálnym softvérom. Počítačovo riadené ovládače na každom bedrovom a kolennom kĺbe sú synchronizované s rýchlosťou pohyblivého pásu. Snímače sily na týchto kĺboch sú prepojené tak, aby zaznamenávali a merali interakciu medzi pacientom a systémom LOKOMAT®. Keďže sú parametre každého tréningu (vzdialenosť, rýchlosť, počet krokov, miera odľahčenia hmotnosti aj guidance force – vodiaca sila) dobre definované a kontinuálne monitorované, tréning chôdze môže byť ľahko porovnateľný interindividuálne ako aj medzi jednotlivými terapeutickými jednotkami. Táto skutočnosť ponúka nové možnosti nielen pre výskum, ale aj pre špecifický terapeutický plán a vedenie pacienta.
Dôležitým prvkom v terapii je dynamická fixácia panvy pomocou ortéz a polohovateľnej panvovej opierky, čo umožňuje dosiahnuť priblíženie sa k jej fyziologickému postaveniu pri ideálnom stereotype chôdze. Dorzálnu flexiu členkového kĺbu dosahujeme pomocou pasívneho upnutia chodidla (foot lifter). Na monitoroch smerovaných k pacientovi aj terapeutovi môžeme v reálnom čase vizuálne sledovať a ovplyvňovať priebeh cvičenia. Na zvýšenie motivácie detského pacienta bol vyvinutý program umožňujúci tréning vo virtuálnom prostredí. Počas tréningu sa pacient pohybuje v rôznych typoch virtuálneho prostredia, kde rieši rozličné úlohy, čo zvyšuje možnosť aktívnej participácie detského pacienta v terapeutickom procese.

INTERVENCIA
Roboticky asistovaná lokomočná terapia v systéme Lokomat® bola základnou (hlavnou) terapeutickou intervenciou u pacientov participujúcich v tejto štúdii. Keďže doposiaľ neexistuje všeobecne platné odporúčanie pre aplikáciu RATT u pacientov s DMO, dĺžku trvania terapie a frekvenciu jednotlivých terapeutických jednotiek sme stanovili podľa skúseností a poznatkov zo zahraničných štúdií a taktiež so zreteľom na individuálne možnosti pacienta a jeho rodičov. Pacienti absolvovali 20 terapeutických jednotiek počas 4-6 týždňov s frekvenciou 3-5x týždenne. Jedna terapeutická jednotka trvala 55 minút. Nastavenie a umiestnenie pacienta do zariadenia v jednotlivých sedeniach trvá približne 15 min., chôdza 30 minút. Sňatie pacienta zo zariadenia po terapeutickej intervencii trvá približne 10 min., takže celkové trvanie jednej terapeutickej jednotky je limitované na 55 minút. Rýchlosť chôdze sa pohybovala od 1,1 km/h (u závažnejšie postihnutých) do 1,7 km/h (u miernejšie postihnutých pacientov).
POUŽITÉ TESTY
Všetky hodnotenia sa uskutočnili do 24 hodín pred terapiou a do 24 hodín po poslednej terapeutickej jednotke. Pred terapiou boli pacienti štandardne ambulantne vyšetrení. V tejto štúdii používame na evaluáciu motorických funkcií dieťaťa podrobnejšiu 88-položkovú verziu GMFM (Gross Motor Function Measure), ktorá hodnotí motorické schopnosti dieťaťa v piatich dimenziách: A – ľah a otáčanie, 17 položiek, B – sed, 20 položiek, C – lezenie a kľak, 14 položiek, D – stoj, 13 položiek, E – chôdza, beh a poskoky, 24 položiek. (32, 33). Rýchlosť chôdze sme hodnotili 10 MWT (10 meter walking test). Stopkami sa zaznamenával čas, ktorý deti potrebovali na zvládnutie vzdialenosti 10 m (31). Výdrž pri chôdzi bola hodnotená pomocou 6-minútového. WT (6 min. walking test). Zaznamenali sme celkovú vzdialenosť, ktorú dieťa prešlo počas 6 minút (36). Potrebu asistencie pri chôdzi sme vyjadrili prostredníctvom FAC (Functional Ambulation Categories). Zahŕňa 6 úrovní podpory potrebnej pri chôdzi od úrovne 0, keď pacient nie je schopný chôdze a potrebuje asistenciu dvoch alebo viacerých osôb po úroveň 5, čo znamená nezávislú chôdzu (14). Počas hodnotenia rýchlosti a vytrvalosti chôdze mohli pacienti používať obuv, ortézy, príp. iné pomôcky, ktoré používajú najčastejšie. Čas chôdze (min.), vzdialenosť prejdenú počas jednej terapeutickej jednotky a celkovo (m) a priemernú rýchlosť chôdze počas každého tréningu vyhodnocuje systém Lokomat®.
POUŽITÉ ŠTATISTICKÉ METÓDY
Dáta sme spracovali pomocou programov MS Office Excel 2007 a SPSS 16.0 for Windows. Súbory dát v našom prípade boli testované na normalitu Kolmogorov-Smirnovovým testom normality. Keďže v našom prípade v súboroch nebola zachovaná normálna distribúcia dát, bol pre porovnanie 2 súborov dát použitý neparametrický Wilcoxonov test pre párové hodnoty. Pre hodnotenie rozdielov vstupných a výstupných hodnôt v závislosti od závažnosti postihnutia sme použili Mann-Whitney test dvoch nezávislých súborov. Výsledky sú považované za štatisticky signifikantné pri p < 0,05 a vysoko štatisticky signifikantné pokiaľ je p < 0,001.
VÝSLEDKY
Hodnotenie zlepšenia motorických funkcií a funkčných parametrov chôdze
51 pacientov s bilaterálne spastickou DMO absolvovalo počas obdobia 4-6 týždňov s frekvenciou 3-5x týždenne 20 terapeutických jednotiek roboticky asistovanej lokomočnej terapie v systéme Lokomat®. Priemerný čas trvania jednej terapeutickej jednotky (T. J.) na pacienta bol 30,21 min. (SD 4,90, v rozpätí 20,39 - 39,36) a priemerná vzdialenosť, ktorú pacienti prešli počas jednej terapeutickej jednotky, bola 649,79 m (SD 187,35, v rozpätí 131-975). Priemerná celková vzdialenosť na pacienta počas terapie pozostávajúcej z 20 T. J. bola 13197,43 m (SD 3889,54, v rozpätí 2481 - 19502) a priemerný celkový čas na pacienta bol 615,66 min. (SD 108,65, v rozpätí 392,24 - 879,04).
Hodnotené vstupné parametre sa po absolvovaní 20 T. J. v sledovanom súbore zlepšili nasledovne:
Signifikantné zlepšenie sme zaznamenali v dimenzii A (ľah, otáčanie) z priemerného (SD) 76,16 % (17,27 %) na 86,04 % (13,65 %); Z = -5,779; p = 0,000, čo znamenalo zlepšenie o 9,88 %. V kategórii B (sed) sme evidovali signifikantné zlepšenie o 10,67 % z priemerného (SD) 60,58 % (29,03 %) na 71,25 % (27,37 %); Z = -6,93; p = 0,000. Celkové skóre dimenzie C (lezenie, kľačanie) v GMFM vzrástlo signifikantne o 9,02 % z priemerných 57,59 % (29,86 %) na 66,61 % (30,03 %); Z = -6,247; p = 0,000. Skóre v dimenzii D (stoj) sa zvýšilo signifikantne o 8,29 % z priemerného (SD) 31,82 % (29,73 %) na 40,11 % (32,54 %); Z = -6,247; p = 0,000. V dimenzii E (chôdza) sme zaznamenali signifikantné zlepšenie o 7,32 % z priemerného (SD) 28,27 % (26,35 %) na 35,58 % (29,13 %); Z = -6,326; p = 0,000. Celkovo (total GMFM) sme teda zaznamenali zlepšenie o 9,05 % z priemerného (SD) 50,90 % (24,33 %) na 59,95 % (24,24 %); Z = -7,001; p = 0,000 (graf 1).

Priemerná (SD) rýchlosť chôdze hodnotená 10 mWT u testovaného počtu pacientov (n = 19) preukázala štatisticky signifikantnú úroveň zlepšenia o 18,66 % z 0,75 (0,48) na 0,89 (0,52) m/s; Z = -3,825; p = 0,000. Priemerná vzdialenosť (SD), ktorú pacienti absolvovali počas 6 minút chôdze, hodnotená 6 min. WT, taktiež signifikantne vzrástla o 24,16 % zo 154 (103,21) na 191,21 (114,55) m; Z = -3,824; p = 0,000. V škále FAC, ktorá hodnotí mieru asistencie pri chôdzi, sme po absolvovaní 20 T. J. zaznamenali zvýšenie o 31, 25 % z 1,44 (1,22) na 1,89 (1,33) (Z = -4,684; p = 0,000). Pri hodnotení LŠ podľa Vojtu došlo po absolvovaní 20 T. J. v systéme Lokomat® k zlepšeniu o 5,19 % z priemernej hodnoty (SD) 5,59 (1,43) na 5,88 (1,54), Z = -3,76; p = 0,000). V GMFCS škále sa pacienti po 20 T. J. zlepšili o 8,63 % z priemerných (SD) 3,02 (0,86) na 2,78 (0,78), Z = -3,464; p = 0,001).
Hodnotenie miery zlepšenia motorických funkcií v závislosti od závažnosti postihnutia
DMO s ľahkým motorickým postihnutím (GMFCS I, II, kohorta 1) tvorilo 13 (25,5 %) pacientov. DMO so závažnejším postihnutím (GMFCS III, IV, V, kohorta 2) bolo 38 (74,5 %) pacientov. Zlepšenie v GMFM A, B, C bolo signifikantne vyššie v závažnejšie postihnutej kohorte 2 (GMFCS III, IV,V) v porovnaní s miernejšie postihnutými pacientami v kohorte 1 (GMFCS I, II). Naopak zlepšenie v GMFM D, E bolo výraznejšie v ľahšie postihnutej kohorte 1, avšak nie štatisticky významne (tab. 2, graf 2).

DISKUSIA
Cieľom tejto prospektívnej štúdie bolo determinovať vplyv roboticky asistovanej lokomočnej terapie v systéme Lokomat® na motorické funkcie a funkčné parametre chôdze po cielenom lokomočnom tréningu u detí, adolescentov a dospelých pacientov s DMO. Zároveň sme sa pokúsili posúdiť možnosť ovplyvnenia motorických funkcií prostredníctvom RATT v závislosti od závažnosti postihnutia.
Je potrebné poznamenať, že naša štúdia je limitovaná niekoľkými faktormi. Na prvom mieste je to skutočnosť, že nejde o randomizovanú, placebom kontrolovanú štúdiu. Skupina detí bola heterogénna čo sa týka veku a miery postihnutia. Avšak odráža štandardnú populáciu pediatrickej neurorehabilitačnej ambulancie. Nebola zahrnutá kontrolná skupina a výsledky hodnotenia neboli zaslepené vzhľadom k pre/post tréningovým podmienkam. Počas štúdie sme sa pokúsili uskutočniť testovanie tými istými testujúcimi fyzioterapeutmi, avšak z organizačných dôvodov sa to nedalo dosiahnuť vo všetkých prípadoch.
Taktiež nemôžeme vylúčiť vplyv prirodzeného pokračovania vývoja vo výsledkoch. Existujú však dôkazy, že nedochádza k signifikantným zmenám v prirodzenom vývoji v dimenzii D a E GMFM u detí a adolescentov s DMO počas sledovaného obdobia 3-6 týždňov bez terapeutickej intervencie (17, 18, 34).
Hodnotenie zlepšenia motorických funkcií a funkčných parametrov chôdze
V našej štúdii sme po absolvovaní 20 T. J. v systéme Lokomat® dokumentovali v hodnotených parametroch - GMFM A, B, C, D, E, total, GMFCS, FAC, LŠ, rýchlosť chôdze, výdrž pri chôdzi - štatisticky signifikantné zlepšenie vo všetkých uvedených položkách.
Zlepšenie stereotypu chôdze a jej funkčných parametrov (dimenzia E v GMFM, 10 m WT, 6 min. WT) zapadá do konceptu cieleného motorického učenia. Tieto výsledky zaznamenali tiež vo svojich prácach Meyer-Heim a spol. (26, 27) a Borggraefe a spol. (5, 6), ktorí testovali dimenziu D, E, rýchlosť chôdze a výdrž pri chôdzi po absolvovaní terapie v systéme Lokomat®. Uvedené parametre hodnotí väčšina autorov zaoberajúcich sa tréningom chôdze. Počas terapie sme však zaznamenali tiež výrazné zlepšenie v dimenzii A (ľah, otáčanie), B (sed), C (lezenie, kľak) v GMFM teste, čo predpokladá aditívny priaznivý efekt terapie na stabilizáciu svalstva trupu.
Aj keď pôvodným zámerom a cieľom RATT bolo zlepšenie lokomočných funkcií a zlepšenie stereotypu chôdze - čo by podporilo teóriu motorického učenia opakovaním pohybov, evidovali sme tiež signifikantné zlepšenie funkcie trupového svalstva a uvoľnenie svalového napätia flexorových skupín na DK. Vysvetlenie ponúka koaktivácia agonistov a antagonistov svalstva trupu v rámci vývojovej kineziológie. Pasívnou fixáciou panvy vo frontálnej rovine a aktívnou v sagitálnej rovine v zariadení Lokomat® sa zmenšuje anteflexia panvy, čím je inhibovaný m. rectus femoris a m. tensor fascie latae, a to umožní aktivovať brušné svaly. Dochádza k aktivácii extrarotátorov a abduktorov bedrových kĺbov a redukuje sa ich intrarotačné postavenie. Následne sa zmierňuje flexia v kolenných kĺboch. Aktiváciou brušných svalov sa môže chrbtica uvoľniť čiastočne do extenzie a viac menej i do rotácie. Táto extenzia je v rovnováhe s flexormi osového orgánu (hlboké flexory krku, brušné svaly). V ramennom pletenci dochádza k uvoľneniu intrarotácie, addukcie a protrakcie. V oblasti lopatiek sa do držania trupu môžu aktivovať dolné fixátory lopatiek. Lopatky sa posúvajú kaudálne, nastáva zvýšenie funkčného rozsahu pohybu v proximálnych i distálnych kĺboch hornej končatiny (20). Dieťa tak má k dispozícii kvalitnejší model spontánnej motoriky, čo sa prejaví zvýšením skóre v teste GMFM po terapii v dimenzii A, B, C.
Je diskutabilné, aká veľká zmena v GMFM skóre je klinicky významná. Russell a spol. (32) identifikovali 6% zmenu v GMFM skóre ako klinicky relevantnú. Wang a Yang (40) vo svojej štúdii, týkajúcej sa senzitivity GMFM, uvádzajú, že už zlepšenie o 3,71 % môže byť považované za klinicky významné.
Prvým experimentom v pediatrickej neurorehabilitácii, s cieľom determinovať možnosti roboticky asistovanej lokomočnej terapie u detí s centrálnou poruchou chôdze, bola štúdia Meyer-Heim a spol. (26). 24 z 26 detí (vek 5-19 rokov) ukončilo tréning, čo predstavovalo 19 T. J. u hospitalizovaných a 12 T. J. u ambulantných pacientov.
Meyer-Heim a spol. (27) vo svojej ďalšej štúdii prezentovali výsledky 3-5 týždňov trvajúceho obdobia, počas ktorého 22 detí vo veku 4-11 rokov s diagnostikovanou DMO (GMFCS II až IV) absolvovalo lokomočný tréning v systéme Lokomat®. Priemerný počet terapeutických jednotiek bol 15,1, frekvencia 3-5 terapeutických jednotiek týždenne v dĺžke trvania jednej T. J priemerne 31,5 minút.
Hospitalizovaní pacienti v štúdii Meyer-Heim a spol. (26), ktorí absolvovali 19 T. J., sa zlepšili veľmi podobne ako pacienti v našej štúdii. V našej štúdii sme zaznamenali po 20 T. J. zlepšenie v dimenzii D priemerne o 8,29 % (takmer totožné ako v štúdii Meyer-Heim a spol. (26), kde došlo v dimenzii D k zlepšeniu o 8,7 %), ako aj v dimenzii E priemerne o 7,32 %, čo taktiež znamená štatisticky signifikantný nárast. Rýchlosť chôdze po absolvovaní terapie v našej štúdii bola porovnateľná s Meyer-Heim a spol. (27), kde bol zaznamenaný nárast rýchlosti z 0,78 na 0,91 m/s; p <0,01. V našom prípade to znamenalo štatisticky signifikantnú úroveň zlepšenia z 0,75 na 0,89 m/s; p =0,000. Taktiež porovnateľné zlepšenie sme dokumentovali v 6-min. WT, kde signifikantne vzrástla vzdialenosť, ktorú prešli počas 6 minút chôdze zo 154 na 191,21 m; p =0,000. V 6-minútovom teste chôdze v štúdii Meyer-Heim a spol. (26) bol evidovaný nárast vzdialenosti z priemernej 151,5 m na 251,3 m .
V štúdii Borggraefe a spol. (5) autori prezentujú výsledky po absolvovaní 12 terapeutických jednotiek roboticky asistovanej lokomočnej terapie v systéme Lokomat® u 20 pacientov (vek 4-20 rokov) s diagnostikovanou DMO. Hodnotené parametre boli dimenzia D, E testu GMFM-66. Signifikantné zlepšenie bolo zaznamenané v dimenzii D o 5,9 %, ( p < 0,001) a dimenzii E o 5,3 % (p <0,001).
Dôležitým kritériom v rozhodovaní, či chôdza bude funkčným spôsobom lokomócie u detí s DMO, je tiež rýchlosť chôdze. Tá často obmedzuje schopnosti dieťaťa v existencii v komunite a interakcii s rovesníkmi. Zmeny v rýchlosti chôdze môžu mať zásadný vplyv na nezávislú mobilitu dieťaťa, zvlášť na kratšie vzdialenosti, ako je chôdza po dome alebo presuny medzi triedami v škole. Nárast rýchlosti chôdze a výdrže pri chôdzi vo svojich prácach zaznamenali aj Patritti a spol. (30) a Montinaro a spol. (28). Montinaro a spol. (28) sa zaoberali tiež porovnávaním výsledkov terapie v systéme Lokomat® s tradičnou fyzioterapiou. Z dokumentovaných hodnôt vyplýva trend prevahy v zlepšení parametrov chôdze po absolvovaní roboticky asistovanej terapie v systéme Lokomat®.
Hodnotenie miery zlepšenia motorických funkcií v závislosti od závažnosti postihnutia
Výsledky štúdií zaoberajúcich sa výskumom efektu BWSTT na funkcie hrubej motoriky a chôdzu u detí s DMO predpokladajú, že BWSTT môže mať priaznivý efekt na funkcie súvisiace so schopnosťou chôdze, najmä pri výdrži (3, 9, 31, 34). Deti vo všetkých týchto štúdiách s počiatočným vyšším levelom GMFCS (I, II) preukázali pozitívne zmeny vo funkciách hrubej motoriky, čo súviselo predovšetkým s lepšou schopnosťou chôdze. Závažnejšie postihnuté deti zaradené do GMFCS III, IV, V po terapii preukázali zníženie závislosti na opatrovateľoch, lepšiu toleranciu hmotnosti, zaťaženia dolných končatín pri transferoch a lepšiu schopnosť chôdze v závese (24).
V štúdii Borggraefe a spol. (5) po absolvovaní 12 terapeutických jednotiek roboticky asistovanej lokomočnej terapie v systéme Lokomat® bolo zlepšenie v GMFM D, E signifikantne vyššie v mierne postihnutej skupine pacientov (GMFCS I, II) v porovnaní so závažnejšie postihnutou skupinou (GMFCS III, IV). Pacienti so stredne ťažkým až ťažkým postihnutím dosiahli menšie zlepšenie v porovnaní s ľahko postihnutými pacientmi. To je v zhode s recentnými zisteniami, že DMO pacienti, zaradení do GMFCS III a IV, vykazujú nižší potenciál nadobudnutia/získania motorických funkcií v priebehu času v porovnaní s ľahšie postihnutými pacientmi (podľa vývojových kriviek GMFM) (1, 13).
Podobné výsledky zaznamenali aj autori prípadovej štúdie (35), ktorí popisovali efekt terapie v systéme Lokomat® u 4 detí s DMO (5-8 rokov) s diagnostikovanou spastickou diparézou. Pacienti boli klasifikovaní pomocou GMFCS škály a hodnotili sa u nich charakteristiky chôdze. Dvaja pacienti boli podľa škály GMFCS zaradení to kategórie III. Ďalší dvaja pacienti boli zaradení podľa GMFCS ako II. Všetci absolvovali 6-týždňovú intervenciu RATT, zahŕňajúcu 30-minútovú terapeutickú jednotku s frekvenciou 3x týždenne. Pred a po terapii boli vyhodnocované dimenzie D, E testu GMFM, rýchlosť chôdze (10 m WT) a výdrž pri chôdzi 6 min. WT. Klinická analýza chôdze sa realizovala pomocou zariadenia Vicon 512, ktorý hodnotí zmeny v mechanizme chôdze. Podobne ako v našej štúdii aj tu sa všetci pacienti zlepšili v lokomočných funkciách. U výraznejšie postihnutých detí (GMFCS III) bolo evidované zlepšenie v stoji, ale menšie zlepšenie v mechanizme chôdze. Naopak deti s miernejším postihnutím (GMFCS II) preukázali zlepšenie mechanizmu chôdze, čo zahŕňalo tiež zväčšenie dĺžky kroku, väčšiu extenziu v bedrových kĺboch, výraznejší rozsah v extenzii kolenných kĺbov a zlepšenie postavenia chodidiel . Tieto zmeny viedli k uľahčeniu stereotypu chôdze u detí.
Vzpriamovacie mechanizmy normálneho bipedálneho pohybu vpred predpokladajú zodpovedajúci schopeň zrelosti posturálneho vývoja. Princíp pohybu vpred vyžaduje ako predpoklad neporušeného motorického vývoja harmonický vývoj posturálnej reaktibility s primeranými vzpriamovacími mechanizmami a so zodpovedajúcou fázovou pohyblivosťou (38). U pacientov s posturálnou instabilitou je potrebné začať ovplyvnením koordinácie trupovej stabilizácie. Ovplyvnenie stabilizačného systému chrbtice musí predchádzať vo vývojových radách. Neexistuje pohyb končatín (lokomócia) bez stabilizácie trupu ako celku (21).
Z výsledkov našej štúdie vyplýva, že zlepšenie dimenzií A (ľah, otáčanie), B (sed), C (lezenie, kľačanie) v GMFM bolo signifikantne vyššie v závažnejšie postihnutej kohorte 2 (GMFCS III, IV, V) v porovnaní s miernejšie postihnutými pacientmi v kohorte 1 (GMFCS I, II). Naopak zlepšenie skóre D (stoj) a E (chôdza, beh, poskoky) testu GMFM bolo výraznejšie v ľahšie postihnutej kohorte 1, avšak nie štatisticky významne.
Zmeny, ktoré sme zaznamenali u našich pacientov v súvislosti so závažnosťou postihnutia, potvrdzujú fakt, že skutočné vzpriamenie je možné až vtedy, keď prevládne vplyv centrálnych riadiacich úrovní, ktorý udrží stabilizáciu vo vertikále. Neurofyziologický hierarchický koncept, podľa ktorého v priebehu vývoja dieťaťa pozvoľne nastupuje vplyv mozgovej kôry potláčajúcej prejavy spinálnych a subkortikálnych reflexov, sa odráža aj v experimentálnych prácach iných autorov (21).
Iné aspekty RATT
Niekoľko štúdií sa tiež zaoberalo pretrvávaním dosiahnutých výsledkov terapie RATT, prípadne BWSTT. Z recentných štúdií a publikovaných prác vyplýva, že dosiahnutý efekt terapie pretrváva po dobu minimálne 4 mesiacov (6, 9, 11, 26, 28, 30, 34).
Významným faktorom úspechu terapie je taktiež spolupráca a aktívna participácia pacienta na liečbe. Ako uvádza Koenig a spol.(19) a ako sme aj my pozorovali počas trvania tejto štúdie, implementácia kontrolných stratégií a adaptovaného biofeedback systému pre deti je dôležitým faktorom pri získaní maximálnej participácie predovšetkým detského pacienta, ktorú významne uľahčujú v Lokomate® integrované technológie umožňujúce chôdzu vo virtuálnej realite.
Zlepšenie vo výsledných meraniach, preukázané v nami prezentovanej štúdii, bolo konzistentné s referenciami pacientov, rodičov a opatrovateľov, ktorí väčšinou zaznamenali väčšiu výdrž, vytrvalosť, zlepšenie schopnosti chodiť po schodoch a celkové zlepšenie mobility detí a adolescentov po terapii v systéme Lokomat® pri vykonávaní bežných denných aktivít v rôznych polohách (sed, stoj, ľah). Taktiež evidovali zlepšenie transferov či už za pomoci bariel, chodítka, s asistenciou druhej osoby, alebo aj iným spôsobom. U participientov neboli zaznamenané nijaké vedľajšie nežiaduce účinky.
Správny manažment liečby DMO je jedinou profylaxiou pred komplikáciami vyplývajúcimi zo štrukturálnych porúch (bolesť, sekundárne muskuloskeletárne problémy, možné poruchy funkcie vnútorných orgánov, ortopedická, protetická, chirurgická intervencia s nevyhnutnou hospitalizáciou či následnou kúpeľnou liečbou), čo v konečnom dôsledku umožňuje výrazne znížiť náklady na následnú zdravotnú starostlivosť.
ZÁVER
V sledovanom súbore pacientov tejto prospektívnej klinickej štúdie došlo po 4-6 týždňov trvajúcej terapii v systéme Lokomat® k štatisticky vysoko signifikantnému zlepšeniu motorických funkcií hodnotených testom GMFM (dimenzia A, B, C, D, E, total), FAC, LŠ, GMFCS u pacientov miernejšie i závažnejšie postihnutých. Zároveň sme zaznamenali štatisticky signifikantné zvýšenie rýchlosti chôdze v 10-metrovom teste chôdze a výdrže pri chôdzi hodnotenej 6-minútovým testom chôdze. Stabilizácia trupového svalstva, predchádzajúca zlepšenie v parametroch stoja a chôdze, poukazuje na platnosť neurovývojového konceptu, ktorý vychádza z ontogenézy dieťaťa.
Závažnejšie postihnutí pacienti (GMFSC III, IV, V) sa zlepšili výraznejšie v dimenziách monitorujúcich stabilizáciu trupového svalstva – A (ľah, otáčanie), B (sed), C (lezenie kľačanie) testu GMFM. Miernejšie postihnutí pacienti (GMFCS I, II) preukázali výraznejšie zlepšenie v dimenzii D (stoj), E (chôdza). Závažnosť postihnutia ovplyvnila výsledky terapie.
Tréning chôdze v systéme Lokomat® je bezpečný (7), jednoducho realizovateľný a dobre tolerovaný u sledovanej skupiny (chodiacich aj nechodiacich) pacientov s DMO bez nežiaducich účinkov.
DGO tréning bol úspešne integrovaný do rehabilitačného programu detí, adolescentov a dospelých pacientov s DMO ako jedna z možností zvýšenia participácie v motorickej aktivite a výsledky naznačujú zlepšenie lokomočných funkcií.
Zoznam skratiek:
- RATT – Robot-assisted treadmill training
- GMFM – Gross Motor Function Measure
- GMFCS – Gross motor function classification scale
- CPG – Central pattern generator
- DGO – Driven gait orthosis
- BWSTT – Body weight supported treadmill training
- SCI – Spinal Cord Injuries
- TBI – Traumatic Brain Injuries
- ICD – International Classification of Diseases
- FAC – Functional Ambulation Categories
- 10 m WT – 10 meter walking test
- 6 min. WT – 6 minute walking test
Adresa pro korespondenci:
MUDr. Stanislava Klobucká, Ph.D.
Rehabilitačné centrum Harmony
Kudlákova 2
841 01 Bratislava
Slovenská republika
e-mail: stanislavaklobucka@gmail.com
Sources
1. Beckung, E., Carlsson, G., Carlsdotter, S., Uvebrant, P.: The natural history of gross motor development in children with cerebral palsy aged 1 to 15 years. Dev. Med. Child. Neurol., roč. 49, 2007, č. 10, s. 751-756.
2. Beer, S., Aschbacher, B., Manoglou, D., Gamper, E., Kool, J., Kesselring, J.: Robot-assisted gait training in multiple sclerosis: a pilot randomized trial. Mult. Scler, roč. 14, 2008, č. 2, s. 231-236.
3. Begnoche, D. M., Pitetti, K. H.: Effects of traditional treatment and partial body weight treadmill training on the motor skills of children with spastic cerebral palsy: A pilot study. Pediatr. Phys. Ther., roč. 19, 2007, č. 1,s. 11-19.
4. Borggraefe, I., Meyer-Heim, A., Kumar, A., Schaefer, J. S., Berweck, S., Heinen, F.: Improved gait parameters after Robotic-Assisted Locomotor treadmill therapy in a 6-year-old child with cerebral palsy. Movement Disord., roč. 23, 2008, č. 2, s. 280-283.
5. Borggraefe, I., Schaefer, J. S., Klaiber, M., Dabrowski, E. et al.: Robotic-assisted treadmill therapy improves walking and standing performance in children and adolescents with cerebral palsy. Eur J. Pediatr. Neurol., roč. 14, 2010, č. 6, s. 496-502.
6. Borggraefe, I., Kiwull, L., Schaefer, J. S., Koerte, I. et al.: Sustainability of motor performance after robotic-assisted treadmill therapy in children: an open, non randomized baseline-treatment study. Eur J. Phys. Rehabil. Med., roč. 46, 2010, č. 2, s.125-131.
7. Borggraefe, I., Klaiber, M., Schuler, T., Warken, B. et al.: Safety of robotic-assisted treadmill therapy in children and adolescents with gait impairment: A bi-centre survey. Dev. Neurorehabil., roč. 13, 2010, č. 2, s. 114-119.
8. Cazalets, J. R., Borde, M., Clarac, F.: Localization and organization of the central pattern generator for hindlimb Locomotion in newborn Rat. J. Neurosci, roč. 15, 1995, č. 7, s. 4943-4951.
9. Day, J. A., Fox, E. J., Lowe, J., Swales, H. B., Behrman, A. L.: Locomotor training with partial body weight support on a treadmill in a nonambulatory child with spastic tetraplegic cerebral palsy: A case report. Pediatr. Phys. Ther., roč. 16, 2004, č. 2, s. 106-113.
10. Dietz, V., Müller, R., Colombo, G.: Locomotor activity in spinal man: significance of afferent input from joint and load receptors. Brain, roč. 125, 2002, č. 12, s. 2626-2634.
11. Dodd, K. J., Foley, S.: Partial body-weight-supported treadmill training can improve walking in children with cerebral palsy: a clinical controlled trial. Dev. Med. Child.Neurol., roč. 49, 2007, č. 2, s. 101-105.
12. Duysens, J., Van de Crommert, H.: Neural control of locomotion, Part 1: The central pattern generator from cats to humans. Gait Posture, roč. 7, 1998, s. 131-141.
13. Hanna, S. E., Bartlett, D. J., Rivard, L. M., Russel, D. J.: Reference curves for the gross motor function measure: percentiles for clinical description and tracking over time among children with cerebral palsy. Phys. Ther., roč. 88, 2008, č. 5, s. 596-607.
14. Holden, M. K., Gill, K. M., Magliozzi, M. R. et al.: Clinical gait assessment in the neurologically: reliability and meaningfulness. Phys. Ther., roč. 64, 1984, č. 1, s. 35-40.
15. Hornby, T. G., Zemon, D. H., Campbell, D.: Robotic assisted, body-weight-supported treadmill training in individuals following motor incomplete spinal cord injury. Phys. Ther., roč. 85, 2005, č. 1, s. 52-66.
16. Husemann, B., Müller, F., Krewer, C., Heller, S., Koenig, E.: Effects of locomotion training with assistance of Robot-driven gait orthosis in hemiparetic patients after stroke. Stroke, roč. 38, 2007, č. 2, s. 349-354.
17. Cherng, R. J., Liu, C. F., Lau, T. W., Hong, R. B.: Effect of treadmill training with body weight support on gait and gross motor function in children with spastic cerebral palsy. Am. J. Phys. Med. Rehabil., roč. 86, 2007, č. 7, s. 548-555.
18. Knox, V., Evans, A. L.: Evaluation of the functional effects of a course of Bobath therapy in children with cerebral palsy: a preliminary study. Dev. Med. Child. Neurol., roč. 44, 2002, č. 7, s. 447-460.
19. Koenig, A., Brütsch, K., Zimmerli, L., Guidali, M., Duschau-Wicke, A.: Virtual environments increase participation of children with cerebral palsy in robot-aided treadmill training. Virtual Rehabilitation. [online], 2008, s. 121-126. http://ecollection.ethbib.ethz.ch/eserv.php?pid=eth:1513&dsID=eth-1513-01.pdf [accessed:2010-10-10]
20. Kokavec, M., Žiaková, E.: Vývojová dysplázia bedrového kĺbu. Diagnostika a liečba na princípoch vývojovej kineziológie. Bratislava, Herba, 2008. 116 s., ISBN 978-80 - 89171-54-5.
21. KOLÁŘ, P. et al.: Rehabilitace v klinické praxi. 1. vyd., Praha, Galén, 2010. 713 s., ISBN 978-80-7262-657-1.
22. KŘÍŽ, J. el al.: Trénink lokomoce v závěsu u pacientů po poranění míchy. Cesk Slov Neurol., roč. 73/106, 2010, č. 2, s. 124-130.
23. Mac Kay-Lyons, M.: Central pattern generation of locomotion: a review of evidence. Phys. Ther., roč. 82, 2002, č. 1, s. 69-83.
24. Mattern-Baxter, K.: Effects of partial body weight supported treadmill training on children with cerebral palsy. Pediatr. Phys. Ther., roč. 21, 2009, č. 1, s. 12-21.
25. Mayr, A., Kofler, M., Quirbach, E., Matzak, H., Fröhlich, K., Saltuari, L.: Prospective, blinded, randomized crossover study of gait rehabilitation in stroke patients using the lokomat gait orthosis. Neurorehab. Neural. Repair., roč. 21, 2007, č. 4, s. 307-314.
26. Meyer-Heim, A., Borggraefe, I., Ammann-Reiffer, C. et al.: Feasibility of robotic assisted locomotor training in children with central gait impairment. Dev. Med. Child. Neurol., roč. 49, 2007, č. 12, s. 900-906.
27. Meyer-Heim, A., Ammann-Reiffer, C., Schmartz, A. et al.: Improvement of walking abilities after robotic-assisted locomotion training in children with cerebral palsy. Arch. Dis. Child; roč. 94, 2009, č. 8, s. 615-620.
28. Montinaro, A., Piccinini, L., Romei, M. et al.: Robotic-assisted locomotion training in children affected by cerebral palsy. Gait Posture, roč. 33, 2011, Suppl. 1, S55-S56.
29. Palisano, R., Rosenbaum, P., Walter, S., Russell, D., Wood, E., Galuppi, B.: Development and reliability of a system to classify gross motor function in children with cerebral palsy. Dev. Med. Child. Neurol., roč. 39, 1997, č. 4, s. 214-223.
30. Patritti, B., Sicari, M., Deming, M.: Enhancement and retention of locomotor function in children with cerebral palsy after robotic gait training. Gait Posture 2011, 30, 2009, Supplement 2, S9-S10.
31. Provost, B., Dieruf, K., Burtner, P. A. et al.: Endurance and gait in children with cerebral palsy after intensive body weight–supported treadmill training. Pediatr. Phys. Ther., roč. 19, 2007, č. 1, s. 2-10.
32. Russell, D. J., Rosenbaum, P. L., Cadman, D. T. et al.: The gross motor function measure: A means to evaluate the effects of physical therapy. Dev. Med. Child. Neurol., roč. 31, 1989, č. 3, s. 341-352.
33. Russell, D. J., Rosenbaum, P. L., Avery, L. M., Lane, M.: Gross motor function measure (GMFM-66 & GMFM-88) user’s manual. Clinics in Developmental Medicíně, č. 159. London, Mac Keith Press, 2002, ISBN 1 89868329 8.
34. Schindl, M. R., Forstner, C., Kern, H., Hesse, S.: Treadmill training with partial body weight support in nonambulantory patients with cerebral palsy. Arch. Phys. Med. Rehabil., roč. 81, 2000, č. 3, s. 301-306.
35. Sicari, M., Patritti, B., Deming, L. C. et al.: Robotic gait training in children with cerebral palsy: A case series. Gait Posture 2011, roč. 30, 2009, Supplement 1, S2.
36. Thompson, P., Beath, T., Bell, J. et al.: Test–retest reliability of the 10-metre fast walk test and 6-minute walk test in ambulatory school-aged children with cerebral palsy. Dev. Med. Child Neurol., roč. 50, 2008, č. 5, s. 370-376.
37. Ustinova, K., Chernikova, L., Bilimenko, A., Telenkov, A., Epstein, N.: Effect of robotic locomotor training in an individual with Parkinson's disease: a case report. Disabil. Rehabil. Assistive technology, roč. 6, 2011, č. 1, s. 77-85.
38. VOJTA, V.: Cerebrálne poruchy pohybového ústrojenstva. 1. vyd., Bratislava, MK 3, 1993, 266 s., ISBN 80-966983-0-3.
39. Westlake, K. P., Patten, C.: Pilot study of lokomat versus manual-assisted treadmill training for locomotor recovery post–stroke. J. NeuroEng. Rehabil., roč. 6, 2009, č. 18.
40. Wang, H., Yang, Y.: Evaluation the responsiveness of 2 versions of the gross motor function measure for children with cerebral palsy. Arch. Phys.Med. Rehabil., roč. 87, 2006, č. 1, s. 51-56.
41. Wirtz, M., Zemon, D. H., Rupp, R. et al.: Effectiveness of automated locomotor training in patients with chronic incomplete spinal cord injury: A multicenter trial. Arch. Phys. Med. Rehabil., roč. 86, 2005, č. 4, s. 672-680.
Labels
Physiotherapist, university degree Rehabilitation Sports medicineArticle was published in
Rehabilitation & Physical Medicine

2013 Issue 3
- Hope Awakens with Early Diagnosis of Parkinson's Disease Based on Skin Odor
- Deep stimulation of the globus pallidus improved clinical symptoms in a patient with refractory parkinsonism and genetic mutation
Most read in this issue
- Nácvik stabilizace kolenního kloubu s využitím TRX Suspension Trainer
- Model terapie chronické bolesti zad v centrech léčby bolesti
- Pracovní rehabilitace - metodika Isernhagen Work System (IWS)
- Možnosti využití aktivních videoher v rehabilitaci