
Measuring regularity of fine upper limb movements with a haptic platform for motor learning and rehabilitation
Robot-assisted systems for arm training are being increasingly used to target moderate-to-severe upper limb impairments in rehabilitation facilities, while hand fine motor skills are seldom being targeted by these machines. This manuscript describes and tests the feasibility of a system based on a haptic interface aimed to complement the efficacy of robotic training in the rehabilitation and motor learning associated with upper extremities movements. End-effector kinematics associated with different trajectory tasks performed by 11 healthy adults were used to extract measures of smoothness, under different testing conditions that included the presence or absence of visual and haptic feedback, the use of dominant vs. non dominant hand, different shapes (crosses and circles), and the verse with which movements were done. The normalized mean square jerk, extracted from the system together with specific speed parameters, was able to capture differences in regularity between the different shapes (MSJratio significantly higher when drawing crosses, p < 1.0 E-4), and that haptic feedback significantly influences this smoothness measure (MSJratio significantly higher when haptic feedback is present, p < 5.0 E-4). The proposed system may be used as a means to monitor the progress of movement regularity in robot-mediated therapy, and the results obtained experimentally highlight the influence of haptic feedback on the smoothness of finalized upper extremity fine movements.
Keywords:
Haptics, motor skill learning, force fields, movement regularity
Authors:
Baldassarre D’elia 1; Ivan Bernabucci 1; Daniele Bibbo 1; Silvia Conforto 1; Tommaso D’alessio 1; Salvatore A. Sciuto 1; Andrea Scorza 1; Maurizio Schmid 1
Authors‘ workplace:
Department of Engineering, Roma Tre University, Rome, Italy
1
Published in:
Lékař a technika - Clinician and Technology No. 1, 2016, 46, 5-12
Category:
Original research
Overview
Robot-assisted systems for arm training are being increasingly used to target moderate-to-severe upper limb impairments in rehabilitation facilities, while hand fine motor skills are seldom being targeted by these machines. This manuscript describes and tests the feasibility of a system based on a haptic interface aimed to complement the efficacy of robotic training in the rehabilitation and motor learning associated with upper extremities movements. End-effector kinematics associated with different trajectory tasks performed by 11 healthy adults were used to extract measures of smoothness, under different testing conditions that included the presence or absence of visual and haptic feedback, the use of dominant vs. non dominant hand, different shapes (crosses and circles), and the verse with which movements were done. The normalized mean square jerk, extracted from the system together with specific speed parameters, was able to capture differences in regularity between the different shapes (MSJratio significantly higher when drawing crosses, p < 1.0 E-4), and that haptic feedback significantly influences this smoothness measure (MSJratio significantly higher when haptic feedback is present, p < 5.0 E-4). The proposed system may be used as a means to monitor the progress of movement regularity in robot-mediated therapy, and the results obtained experimentally highlight the influence of haptic feedback on the smoothness of finalized upper extremity fine movements.
Keywords:
Haptics, motor skill learning, force fields, movement regularity
Introduction
Brain diseases can cause difficulties in motor control, affecting everyday life quality of patients. Among them, stroke is the leading cause of disability, as its prevalence is around 3 percent of the population: in 2010, it has been estimated that about 33 million people suffer from stroke in the world, with a survival rate that exceeds 80% [1]. Most stroke survivors can experience consequences on language, motor control of limbs and other functions associated with neural activity. When dealing with a post-stroke individual, rehabilitation therapy, which is usually based on best practices, can last up to a few months [2]. As for many human-mediated activities, in this kind of therapy it is not always easy to reach a high level of measurability and repeatability, but therapists can interpret patients' needs and satisfy them with the flexibility given by their experience and professional skills. Different strategies can be used by the physical therapist, and there is an open debate about which paradigm is most effective: among others, the most popular is the so-called “constraint-induced movement therapy” (CIMT) [3], where movements of the unaffected limb are selectively restrained, to promote movement of the affected side. The possibility to recover lost functions due to neural damage through physical therapy is allowed by the so-called “neural plasticity”, which is based on recruiting survived additional neural cells. Neural plasticity also plays a major role when individuals are asked to perform motor tasks in novel environmental conditions, such as visual distortions [4], or altered force fields [5].
Following this perspective, in the early nineties, an electromechanical machine with a control system based on a computer program was proposed [6] as a possible means to train arm movements in stroke survivors, by providing force fields through a robot, based on the idea that repeating movements in unexperienced conditions would help rebuild damaged motor functions in the brain: developing this idea, the so-called MIT-Manus opened up the use of robotics for rehabilitation. In the last decade, many different machines have been designed and realised for the same purpose: MIME [7], ARM Guide [8], ARMin [9], Braccio di ferro [10]. In most of these robots, force fields can be generated to assist or make more difficult the trajectory being performed by the patient, inducing altered sensations of viscosity through tactile perception [11], and this is why the above systems are considered haptic [12].
In terms of clinical use of the robot-mediated therapy, Lo et al. [13] reported that in patients with long-term upper limb deficits after stroke, the outcomes improved over a longer time range (36 weeks) as compared with standard therapy. This highlighted the utility of administering the therapy for a longer time, possibly also outside the hospital walls [14]. Most of the systems used to administer therapy at home provide an auditory, visual, or augmented feedback to the patient at home, based on a number of tasks to be performed, and they do not generally include haptic feedbacks, thus limiting the impact of rehabilitation at home to a specific class of therapies, targeting recovery of cognitive skills, and leaving out physical therapy after stroke.
Some commercial platforms are now able to provide the user with the sense of touch (see for instance the Phantom Desktop [15] and Falcon [16]). While these systems are more commonly used in medicine specialties, outside the field of physical therapy (minimally invasive surgery [17], dentistry [18]), it could be useful to introduce a new therapeutic system based on one of these interfaces, which are often (reasonably) cheaper, smaller and easier to use and control than the robotic systems listed previously. Depending on the mechanical characteristics of the haptic interface, the new system could complement or replace the robotic systems used in rehabilitation facilities nowadays. Moreover, in everyday living, patients normally perform movements in a 3D space, and interact with common objects coping with the vertical force due to arm and objects weight. From a neurological perspective, it is agreed that the differences of neural correlates between horizontal and vertical movements of the arm [19] show that motor control features may significantly vary when vertical forces come into play, also because there are striking differences in the way the brain is able to adapt to distortions between horizontal and vertical symmetries [20]. Thus, it is necessary that these systems let the users perform 3-D motor tasks.
Regardless of the kind of therapy to be provided through the device, a system that has to be used routinely in physical therapy at home, or as a means to monitor the progress of motor skill learning [21], needs to incorporate a recording section able to capture the kinematics of the movement that is being done. Only in this way it is possible to provide the user with a feedback that represents the kinematics that is captured, and to use these data to monitor the dynamics of the process, through the extraction of some metrics of motor recovery. Flash and Hogan hypothesized that, in presence of goal-directed movements, humans aim at producing them with the smoothest possible movement of the end effector [22]. As the maximization of smoothness can be obtained by producing trajectories with minimum jerk (the time derivative of acceleration), different metrics associated with jerk have been introduced to quantify the ability to coordinate goal directed movements. Movement smoothness is high when tasks are executed by healthy individuals, tends to disappear in stroke survivors [23], and it may reappear as a sign of motor recovery [24]. Different metrics have thus been introduced to quantify the extent of smoothness from kinematic data, such as the number of peaks from velocity profiles [25], measures in the frequency domain [26, 27, 28, 29] such as the relative amount of the velocity power spectral density in specific frequency bands, and the distance from an idealized bell-shaped velocity profile [30]. Among them, an agreed measure is based on some integral value coming from the jerk, on the evidence that high values of jerk correspond to higher variations of acceleration, which, in turns, make a trajectory less smooth.
While research on the use of force fields to generate haptic feedbacks usually focused on large movements, fine movements performed by the upper extremities are somewhat less studied [31]. Following this perspective, this study will test the feasibility of a platform based on a commercially available haptic device (Falcon® by Novint Technologies, inc.), able to provide the user with a visual and haptic feedback, as a tool to monitor end effector kinematics and movement smoothness in different conditions. Among those, specific external force fields have been designed to investigate the influence of haptic feedback on movement smoothness.
Experimental Section
In the following subsections, a description of the proposed system will be presented, then the adopted procedure will be shown, and finally the data analysis will be detailed.
System design
The system is made of two connected main parts: the Falcon interface, and the processing and control station. The interface has an almost spherical handle that can be shifted inside a three-dimensional workspace (volume 10 cm x 10 cm x 10 cm approx.), where the handle can be moved to describe trajectories similar to those drawn by the hand moving simple tools to be used in everyday life. With reference to the haptic and force feedback, the device can apply forces up to about 10 N on the handle in any direction inside the workspace. As reported by different studies that focused on the characterization of the Falcon [32, 33], forces are generated with an actuation frequency of 1000 samples/s.
A USB 2.0 port allows the PC to control the handle and record data, 3D position of the handle among others. When used, the visual feedback has been provided by a red moving circle on a display plane π that follows the projection of the handle displacement on the measurement plane π’: in the case of visual feedback, the screen also showed the area (a light blue ring) within which the handle was supposed to move (see figure 1).

Participants and procedure
In the first set of tests, denoted as Feasibility dataset, each participant was requested to draw specific trajectories (i.e. circles and crosses) under different conditions, to test the accuracy of the system as a means to extract smoothness measures data in point-to-point movements. Circles and crosses trajectories were considered, as it was hypothesized that they would entail a substantial difference in movement regularity.
In the second set of tests, denoted as Haptics dataset, circle exercises were repeated in presence of different feedback modalities, including visual and haptic feedback: in the visual feedback conditions, the participants were allowed to look at a screen representting the performed trajectory and the target circle; in the haptic feedback conditions, a facilitating haptic force field was applied, generating a radial and centripetal force with intensity proportional to the distance from the target circumference.
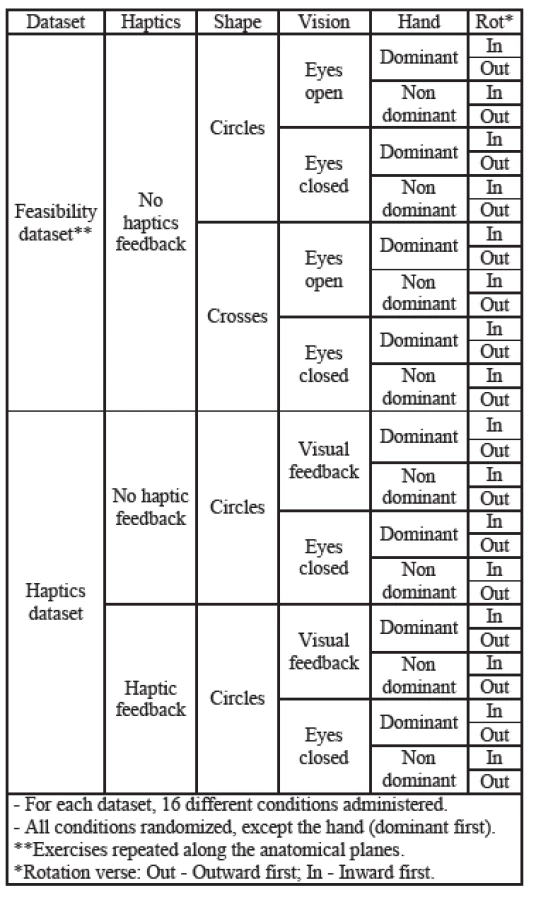
Eleven healthy volunteers (age range 26-40 years, 2 women, 2 left-handed) were recruited, and informed about the procedure. Upon their assent, they were allowed to practice for about one minute to familiarize with the platform, and know the limits of the workspace: they were asked to avoid the workspace borders when doing the exercises. Then, they underwent the trials, and they were told to freely choose their own speed to draw the trajectories. In both datasets, each exercise was composed of 5 repetitions of each trajectory under the following conditions: the use of dominant or nondominant hand, the use of visual feedback (open or closed eyes), the verse of motor task (outward or inward-first), the plane, chosen to be parallel to the major anatomical planes, and the shape they were requested to draw in the space (circles or crosses).
Conditions were randomized, with the exception of asking the volunteers to perform movements with the dominant hand first, to familiarize with the system, and then to perform them with the nondominant hand. A graphical representation of the trajectories to be drawn is shown in figure 2. In the Haptics dataset, only circle trajectories in the coronal plane were considered, while the presence or absence of haptic feedback was added as a condition. The procedure of recruitment and data recording was approved by the department governing body, and in compliance with the Helsinki Declaration. Details on the conditions are listed in table 1.

Data analysis
Raw data of handle position were logged and recorded at a sampling frequency of 166 samples/s. Position data were processed to get kinematics. A third-order Butterworth filter (cut-off frequency 8.3 Hz) was applied to the set of extracted values of each variable. From position data, velocity, acceleration, and jerk along the three directions were calculated. From the jerk components Jx, Jy, Jz, the magnitude of the jerk was calculated as J(t) = √(Jx2+ Jy2+ Jz2), and used as the starting variable from which smoothness parameters are calculated. In particular, we chose the normalization of the mean-squared jerk ratio (MSJratio) [34], where the mean squared jerk (MSJ) is divided by the minimum value of mean squared jerk (MSJmin), defined as the (MSJ) for a trajectory where the 6th derivative of the displacement is null [35]: in this way, it is possible to compare smoothness for trajectories that entail different path lengths and movement durations. MSJratio was thus calculated according to the relation:

where the jerk J(t) is integrated along the duration interval d, and A is the amplitude of movement. In particular, for circle movements, A corresponds to the target circle circumference, while for the cross trajectories, it was considered as 4l, where l is the length of the target cross bar. Data of the 11 healthy volunteers were collected and the logarithm of MSJratio for each exercise (data averaged over 5 repetitions for each exercise) was calculated. Considering both datasets, and all conditions, for each volunteer participating to the Feasibility dataset the total number of exercises summed at 48 (16 different conditions, repeated along three different orthogonal planes), whereas the volunteers participating at the Haptics dataset were requested to perform a total of 16 exercises. On this latter dataset, two additional speed parameters were included: the peak value of the speed magnitude (PS); and the speed metric (SM), a normalized and dimensionless version of the average speed magnitude obtained by dividing it by PS [25], which has been recently used in combination with the Novint Falcon [36].
Statistical analysis
In the Feasibility dataset, MSJratio calculated for the 16 different conditions shown in table 1 underwent statistical analysis; for each group, the results coming from the exercises performed along the three different planes were grouped, as no statistical differences appeared among the three conditions in a preliminary analysis: MSJratio values in the Feasibility dataset underwent multiple-way ANOVA by considering the verse with which (and the hand with which) the subjects performed the movement, together with the presence of the visual feedback, and the kind of shape (i.e. crosses and circles) as factors. In the Haptics dataset, MSJratio, PS, and SM underwent multiple-way ANOVA by considering verse, hand, the presence of the haptic and visual feedbacks as factors. For both datasets, normality was verified through Kolmogorov-Smirnov test, and only one-level interactions were checked.
Experimental results
Feasibility dataset

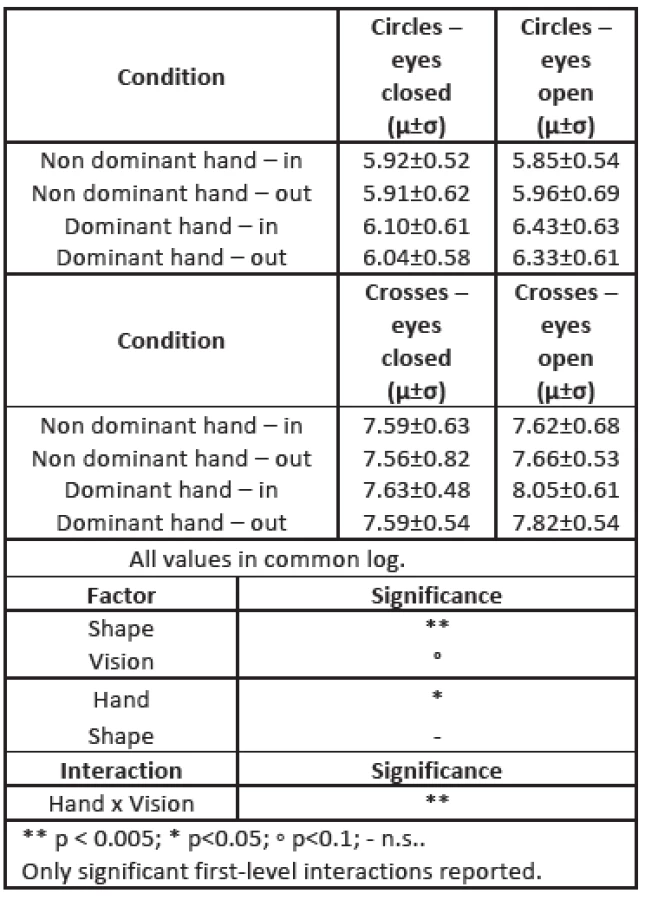
An example of trajectories recorded in the feasibility dataset is illustrated in figure 3. Descriptive statistics and ANOVA results for MSJratio extracted from raw data collected during each exercise for all the participants are reported in table 2.

Higher values of MSJratio resulted for all the trajectories described when executing crosses (p < 1.0 E-4). This happens almost independently from the verse, and is also fairly independent from the hand with which exercises were executed.
Performing exercises with the dominant hand resulted in a significant increase of MSJratio, while vision did not determine a significant increase of MSJratio (p = 8.0 E-2); the increase driven by the use of dominant hand resulted as depending on the presence of vision (interaction p = 4.2 E-2): when drawing circles, exercises done with the dominant hand displayed higher values for MSJratio than those with the non-dominant.
Haptics dataset
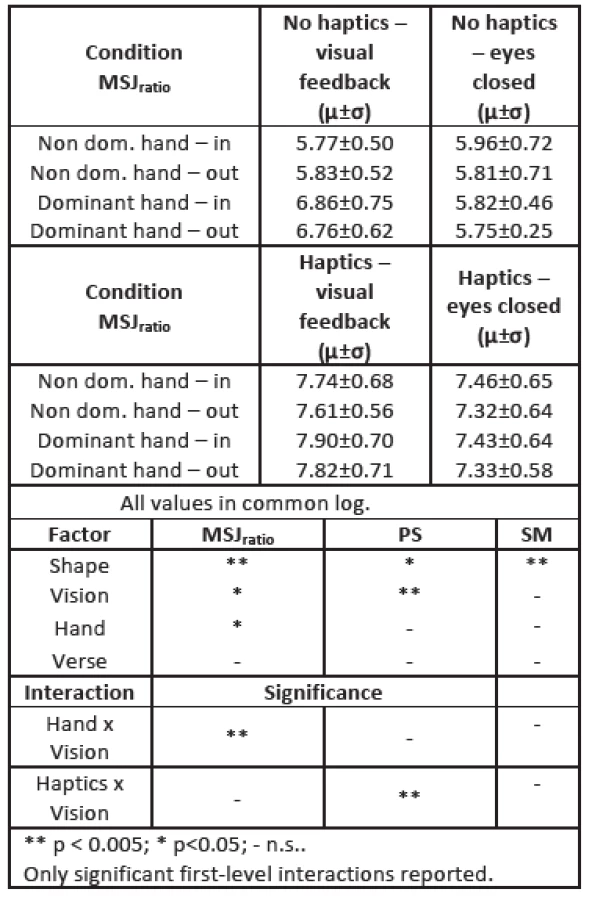
The highest values of MSJratio resulted for the exercises done with haptic feedback and visual feedback, as reported in table 3. ANOVA confirms these observations: the influence of haptic feedback resulted significant (p = 4.0 E-4), so did the visual feedback (p = 1.4 E-2). The use of dominant hand affects jerk values (p = 1.3 E-2). Moreover, the hand with which exercises are done determined changes in the effect of visual feedback (p = 5.8 E-3) but not of haptic feedback (p = 1.4 E-1). In terms of movement execution, we observed a significant increase of the peak speed when haptic feedback is combined with the absence of vision (see figure 4). As for the speed metric, haptic feedback determines a significant decrease (p = 2.8 E-3) of the speed metric, regardless of using vision (see table 3).
Discussion
There is a large debate as to which indicators calculated from J(t) need to be used, to take into account different durations, different amplitudes, and in general, different trajectories. We chose the normalization of the meansquared jerk ratio MSJratio, as this parameter is considered able to evaluate smoothness or regularity of movements [34], where the increase in movement smoothness is agreed as a parameter associated with recovery [24] and, if appropriately normalized, strongly correlates with clinical scale scores [37].
The rather small variance associated with MSJratio measurements extracted from the Feasibility dataset, irrespective of the plane along which the exercises were done, confirms that the platform is able to accurately extract smoothness measures in the proposed conditions. Jerk ratio values are in line with those obtained with other exercises [38], thus confirming the robustness of this parameter to those differences in the task execution that are not hypothesized as determining variations in movement smoothness. Shapes with inherent differences in smoothness, such as circles and crosses (crosses imply a number of starts and stops which, by definition, decrease regularity), determine clear changes in jerk values, and this confirms the ability of the proposed processing in quantifying smoothness measures. It is instead rather counterintuitive that vision increases jerk measures: this may be determined by a higher reliance on the feedback component of trajectory, which may determine a lower smoothness when vision is present. In regards to the resulting increase in jerk measures with the dominant hand, it is possible that the sequence used to perform exercises (dominant hand first, then nondominant) is a stronger factor than that coming from the inherent higher ability of the dominant hand in performing smoother trajectories in learned tasks. As for the significant interaction between hand and vision, we do not have an explanation for this: it can be speculated that, in presence of vision, the feedback component may be different depending on dominance.
In regards to the haptic dataset, the most influencing condition on movement regularity is the haptic feedback. This appeared both in the jerk values and in the two speed parameters, and it is acceptable considering that we involved healthy young individuals, and haptic feedback might be considered as a disturbing factor for motor control purpose. Visual feedback increases jerk and, in particular, it increases the jerk of exercises done with haptic feedback. Considering that in some cases vision may interfere with the execution of finalized upper limb movements [20], it can be speculated that this increase could be a consequence of an attempt to draw more accurate circles when visual feedback is present. This is also confirmed by a clear decrease of the peak speed when visual feedback is provided, if haptics is present. There is also an effect of dominance on smoothness, as if exercises done with the dominant hand were less smooth than those performed with the nondominant hand, and this reflects results obtained in the Feasibility dataset. At last, for both datasets, no significant effects of verse were found: this may be caused by the rather accurate sensorimotor human ability to adapt to altered conditions [39].
Regarding the experimental section, an observational approach has been sought in this study, asking the subjects to perform movements at their preferred speed and accuracy: this paradigm, though necessary to infer on the capacity of the system to handle different conditions, limits the interpretation of the results as to determining the causes associated with differences in movement smoothness: they may be associated with differences in execution time, and in the subjects' choice of accuracy role when drawing shapes. Moreover, the participant sample does not include elderly or poststroke individuals: possible differences in the response to the haptics feedback might emerge when dealing with these sample groups. This is a necessary step to be added in future researches, to determine whether the presence of the haptic feedback is helpful or detrimental to the execution of finalized movements of the upper extremities. The consideration that haptic feedback may not be needed if no pathologies are present – as it decreases movement regularity in young adults – could be a speculation based on the obtained results, and needs to be more deeply investigated on the cited groups.
Conclusions
Haptic machines may be useful tools for robotmediated therapy aimed to neuro-rehabilitation, and they could complement and integrate the activities of physical therapists. With the aim of targeting fine movements executed with the hand, in this research a haptic system was built up, exercises were done by healthy subjects, and collected data were used to extract jerk indicators to draw considerations about motor control of upper limb extremities.
From the statistical analysis, differences appeared across subjects between the shapes with inherent different regularity, and the effect of visual and haptic feedback on movement smoothness brought to some differences: the study of jerk showed that MSJratio is higher for exercises done under haptic feedback conditions and the presence of visual feedback increases these values. The decline in smoothness when haptic feedback is present needs to be more deeply investigated on other sample groups, including healthy elderly people, and individuals recovering from stroke, as this result appears at odds with the hypothesis that haptics help “rebuilding" motor control mechanisms and may thus ultimately help improving movement smoothness. If these considerations will be confirmed by more studies on the cited sample groups, the conflict between jerk and trajectory accuracy should be taken into account in therapies mediated by haptic systems.
Acknowledgement
This study was partially funded by MIUR, and by the authors' University.
Maurizio Schmid, Ph.D.
Department of Engineering
Roma Tre University
Via Vito Volterra 62,
I-00146 Rome,
Italy
E-mail: maurizio.schmid@uniroma3.it
Phone: +39 06 5733 730
Sources
[1] D. Mozaffarian et al., Heart disease and stroke statistics–2015 update: a report from the American Heart Association, Circulation 131 (2015) e29-322.
[2] S. E. Fasoli, H. I. Krebs, J. Stein, W. R. Frontera, N. Hogan, Effects of robotic therapy on motor impairment and recovery in chronic stroke, Arch. Phys. Med. Rehabil. 84 (2003) 477–482.
[3] E. Taub, G. Uswatte, V. W. Mark, D. M. Morris, The learned nonuse phenomenon: implications for rehabilitation, Eur. Medicophys. 42 (2006) 241–256.
[4] Y. Hatada, R. C. Miall, Y. Rossetti, Two waves of a long-lasting aftereffect of prism adaptation measured over 7 days, Exp. Brain Res. 169 (2006) 417–426.
[5] C. S. Li, C. Padoa-Schioppa, E. Bizzi, Neuronal correlates of motor performance and motor learning in the primary motor cortex of monkeys adapting to an external force field, Neuron 30 (2001) 593–607.
[6] N. Hogan, H. I. Krebs, J. Charnnarong, P. Srikrishna, A. Sharon, MIT-MANUS: a workstation for manual therapy and training, in: Proc. IEEE Int. Workshop on Robot and Hum. Commun., Tokyo, Japan, 1992, pp. 161–165.
[7] C. G. Burgar, P. S. Lum, P. C. Shor, H. F. Machiel Van der Loos, Development of robots for rehabilitation therapy: the Palo Alto VA/Stanford experience, J. Rehab. Res. Dev. 37 (2000) 663 – 673.
[8] D. J. Reinkensmeyer, C. D. Takahashi, W. K. Timoszyk, A. N. Reinkensmeyer, L. Kahn, Design of robot assistance for arm movement therapy following stroke, Adv. Rob. 14 (2000) 625–37.
[9] R. Riener, T. Nef, G. Colombo, Robot-aided neurorehabilitation of the upper extremities, Med. Biol. Eng. Comp. 43 (2005) 2–10.
[10] M. Casadio, V. Sanguineti, P. G. Morasso, V. Arrichiello, Braccio di Ferro: a new haptic workstation for neuromotor rehabilitation, Technol. Health Care 14 (2006) 123–142.
[11] P. S. Giro, P. M. Pinto Ramos, O. Postolache, J. M. Dias Pereira, Tactile sensors for robotic applications, Measurement 46 (2013) 1257–71.
[12] M. Casadio, P. Morasso, A. Noriaki Ide, V. Sanguineti, P. Giannoni, Measuring functional recovery of hemiparetic subjects during gentle robot therapy, Measurement 42 (2009) 1176–1187.
[13] A. C. Lo et al., Robot-assisted therapy for long-term upper-limb impairment after stroke, N. Engl. J. Med. 362 (2010) 1772–83.
[14] Penhaker, M., Tran Minh, H. Measurements and data processing in home care telemetry systems, IFMBE Proceedings 43 (2014) 176–179.
[15] Sensable Phantom Desktop. Accessed online 28. 03. 16 at http://www.geomagic.com/en/products-landing-pages/sensable.
[16] Novint Falcon. Accessed online 28. 03. 16 at http://www.novint.com/index.php/products/novintfalcon.
[17] A. C. Lehman, N. A. Wood, S. Farritor, M. R. Goede, D. Oleynikov, Dexterous miniature robot for advanced minimally invasive surgery, Surg. Endosc. 25 (2011) 119–123.
[18] I. Marras, N. Nikolaidis, G. Mikrogeorgis, K. Lyroudia, I. Pitas, A virtual system for cavity preparation in endodontics, J. Dent. Educ. 72 (2008) 494–502.
[19] Z. C. Chao, Y. Nagasaka, N. Fujii, Long-term asynchronous decoding of arm motion using electrocorticographic signals in monkeys, Front. Neuroeng. 3 (2010).
[20] P. Caselli, S. Conforto, M. Schmid, N. Accornero, T. D’Alessio, Difference in sensorimotor adaptation to horizontal and vertical mirror distortions during ballistic arm movements, Hum. Mov. Sci. 25 (2006) 310–325.
[21] A. Ozturk, A. Tartar, B. E. Huseyinsinoglu, A. H. Ertas, A clinically feasible kinematic assessment method of upper extremity motor function impairment after stroke, Measurement 80 (2015) 207–216.
[22] T. Flash, N. Hogan, The coordination of arm movements: an experimentally confirmed mathematical model, J. Neurosci. 5 (1985) 1688–703.
[23] D. G. Kamper, A. N. McKenna-Cole, L. E. Kahn, D. J. Reinkensmeyer, Alterations in reaching after stroke and their relation to movement direction and impairment severity, Arch. Phys. Med. Rehabil. 83 (2002) 702–707.
[24] B. Rohrer, S. Fasoli, H. I. Krebs, R. Hughes, B. Volpe, W. R. Frontera, J. Stein, N. Hogan, Movement smoothness changes during stroke recovery, J. Neurosci. 22 (2002) 8297–8304.
[25] J. V. Robertson, T. Hoellinger, P. Lindberg, D. Bensmail, S. Hanneton, A. Roby-Brami, Effect of auditory feedback differs according to side of hemiparesis: a comparative pilot study, J. Neuroeng. Rehabil. 45 (2009).
[26] L. Battista, A. Scorza, S. A. Sciuto, Experimental characterization of a novel fiber-optic accelerometer for the quantitative assessment of rest tremor in Parkinsonian patients, in: Proc. 9th IASTED Int. Conf. Biomed. Eng., Innsbruck, Austria, 2012, pp. 437–442.
[27] L. F. Meng, H. Y. Chen, C. P. Lu, M. C. Chen, C. N. Chu, The effect of direction on cursor moving kinematics, Sensors 12 (2012) 1919–1929.
[28] L. Battista, A. Scorza, S. A. Sciuto, Preliminary evaluation of a simple optical fiber measurement system for monitoring respiratory pressure in mechanically ventilated infants, in: Proc. 9th IASTED Biomed. Eng., Innsbruck, Austria, 2012, 443–449.
[29] L. Battista, A. Scorza, G. Lupi, S. A. Sciuto, Experimental investigation on dynamical performances of a novel fiber-optic pressure sensor for pulmonary ventilation, in: 20th IMEKO Symp. Meas. El. Quant., Benevento, Italy, 2014, pp. 315-319.
[30] N. Bhushan, R. Shadmehr, Computational nature of human adaptive control during learning of reaching movements in force fields, Biol. Cyber. 81 (1999) 39–60.
[31] E. A. Y. Murakamim, Reaction time and EMG measurement applied to human control modeling, Measurement 43 (2010) 675 – 683.
[32] S. Martin, N. Hillier, Characterisation of the Novint Falcon haptic device for application as a robot manipulator, in: Proc. Austral. Conf. Robot. Autom., Sydney, Australia, 2009, pp. 1–9.
[33] A. Panarese, B. B. Edin, A modified low-cost haptic interface as a tool for complex tactile stimulation, Med. Eng. Phys. 33 (2011) 386–90.
[34] N. Hogan, D. Sternad, On rhythmic and discrete movements: reflections, definitions and implications for motor control, Exp. Br. Res. 181 (2007) 13–30.
[35] R. Shadmehr, S. Wise, The computational neurobiology of reaching and pointing, Cambridge, MA, USA: MIT Press, 2004.
[36] P. Cappa, A. Clerico, O. Nov, M. Porfiri, Can force feedback and science learning enhance the effectiveness of neuro - rehabilitation? An experimental study on using a low-cost 3D joystick and a virtual visit to a zoo, PLoS One 8 (2013) e83945.
[37] O. Celik, M. K. O’Malley, C. Boake, H. S. Levin, N. Yozbatiran, T. A. Reistetter, Normalized movement quality measures for therapeutic robots strongly correlate with clinical motor impairment measures, IEEE Trans. Neural Syst. Rehabil. Eng. 18 (2010) 433–444.
[38] R. Osu, K. Ota, T. Fujiwara, Y. Otaka, M. Kawato, M. G. Liu, Quantifying the quality of hand movement in stroke patients through three-dimensional curvature, JNER 8 (2011).
[39] I. Bernabucci, S. Conforto, M. Schmid, T. D’Alessio, A bioinspired controller of an upper arm model in a perturbed environment, in: Proc. 3rd Int. Conf. Int. Sens. Sens. Netw. Inform., Melbourne, Australia, 2007, pp. 549–553.
Labels
BiomedicineArticle was published in
The Clinician and Technology Journal

2016 Issue 1
Most read in this issue
- The viability of ovarian carcinoma cells A2780 affected by titanium dioxide nanoparticles and low ultrasound intensity
- Raman label-free visualisation of Titanium dioxide nanoparticles uptake in BJ cell LINES
- Optical nerve segmentation using The Active shape method
- NEW METHOD FOR ESTIMATION OF FLUENCE COMPLEXITY IN IMRT FIELDS